TreeLoc 숲에서 6자유도 LiDAR 전역 위치 추정
초록
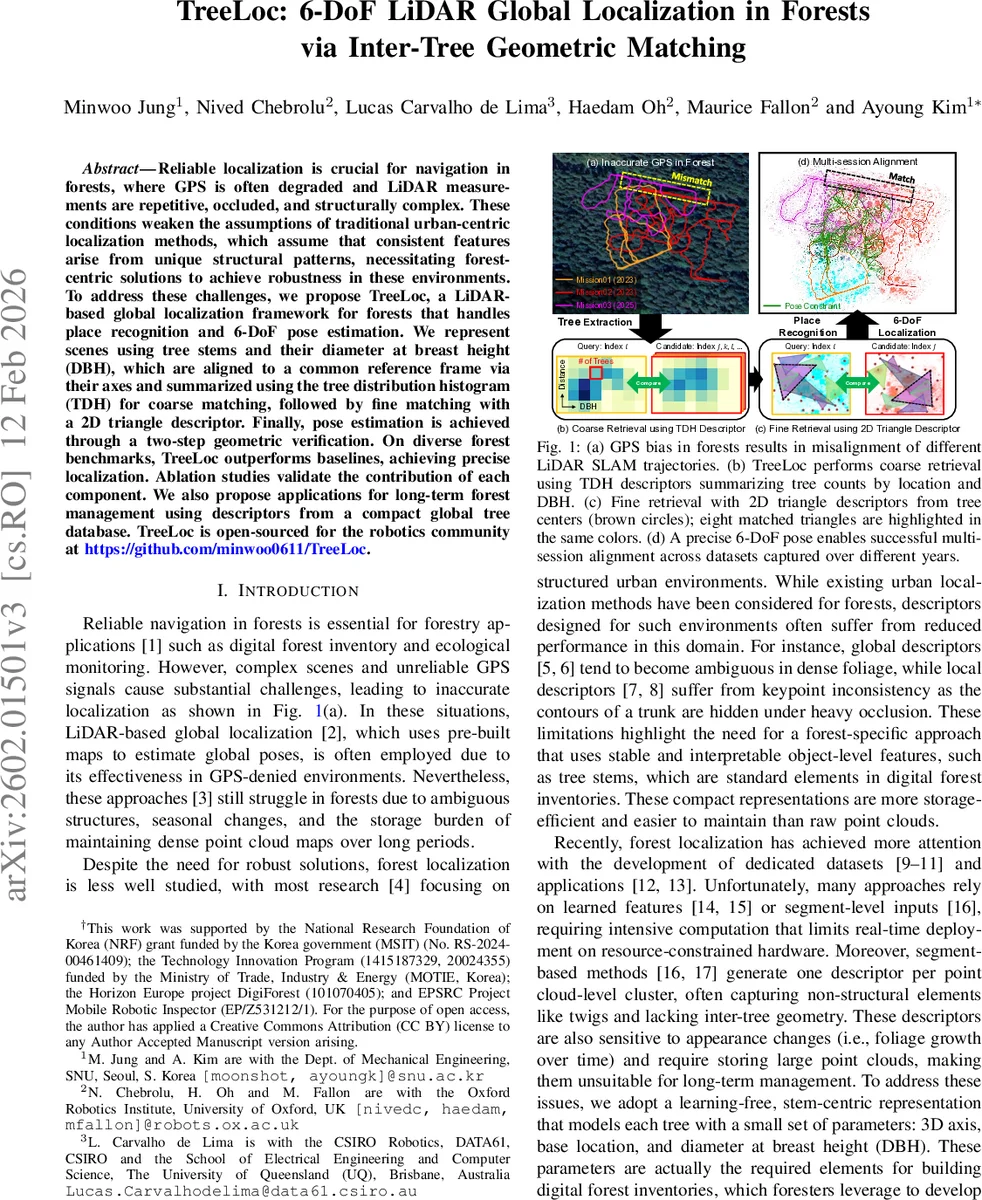
TreeLoc은 나무 줄기와 DBH(가슴높이 직경) 정보를 이용해 숲 환경에서 LiDAR 전역 위치 추정을 수행한다. 트리 분포 히스토그램(TDH)으로 거친 매칭을 하고, 2D 삼각형 디스크립터로 정밀 매칭을 수행한 뒤, 두 단계 기하학 검증을 통해 6자유도 자세를 추정한다. 실험 결과 기존 방법들을 크게 앞서며, 저장 용량도 수십만 배 감소한다.
상세 분석
본 논문은 숲이라는 GPS가 불안정하고 LiDAR 포인트가 중복·폐색·복잡한 환경에서 기존 도시 중심 로컬라이제이션 기법이 갖는 한계를 극복하기 위해, 나무 줄기와 그 직경(DBH)이라는 구조적이고 변하지 않는 객체 수준의 특징을 활용한다는 점에서 혁신적이다. 먼저, RealtimeTrees를 이용해 연속적인 LiDAR 스캔을 하나의 페이로드로 합쳐 충분한 포인트 밀도를 확보하고, 수직 연속성을 기반으로 나무 줄기를 클러스터링한다. 각 나무는 3D 축, 중심 좌표, DBH, 그리고 지면과의 교차점(베이스)이라는 네 개의 파라미터로 압축된다. 이러한 파라미터는 디지털 숲 인벤토리와 직접 연계될 수 있어 장기 관리에도 유리하다.
다음으로, 나무 축을 이용해 롤·피치 보정을 수행한다. 각 나무 축의 단위벡터를 기준으로 RANSAC 기반 최소제곱 최적화를 통해 전역 기준축(ez)와 정렬함으로써, 뷰포인트에 따라 달라지는 2D 투영 왜곡을 최소화한다. 이는 이후 2D 평면 상에서의 거리·각도 관계가 일관되게 유지되도록 하는 핵심 전처리 단계이다.
거친 매칭 단계에서는 트리 분포 히스토그램(TDH)을 도입한다. 나무 중심의 방사형 거리와 DBH를 각각 5·8개의 구간으로 나누어 40차원 히스토그램을 만든 뒤, χ² 거리로 데이터베이스 후보를 빠르게 필터링한다. 이 단계는 연산량이 적고 메모리 효율이 높아 실시간 요구사항을 만족한다.
정밀 매칭에서는 2D 삼각형 디스크립터를 사용한다. 투영된 나무 중심들로 가능한 모든 삼각형을 구성하고, 변의 길이를 정렬한 뒤 해시값을 키로 저장한다. 쿼리와 후보 사이의 공유 키 수를 카운트해 유사도를 측정함으로써, TDH가 놓칠 수 있는 미세한 기하학적 차이를 포착한다.
마지막으로 두 단계 기하학 검증을 수행한다. 첫 단계는 매칭된 삼각형 중심(센트로이드) 간의 평면 변환(Rc, tc)을 SVD로 추정해 3‑DoF(회전+이동) 정렬을 얻는다. 두 번째 단계에서는 정렬된 나무 중심과 베이스 높이 정보를 이용해 4‑DoF(평면 회전·이동+수직 오프셋) 변환을 최적화하고, 이를 전체 6‑DoF 자세 추정에 결합한다. 이 과정은 별도의 ICP나 추가 특징 추출 없이도 높은 정확도를 달성한다.
실험에서는 다양한 공개 숲 데이터셋(다중 시즌·다중 연도)에서 기존 글로벌 디스크립터(RING++, Scan Context)와 로컬 디스크립터(STD, BTC) 등을 능가하는 성공률과 위치 오차를 기록했다. 특히, 메모리 사용량이 수십만 배 감소하고, 추론 시간 50 ms 내외를 달성해 실시간 로봇에 적합함을 입증했다. Ablation 연구를 통해 TDH와 삼각형 디스크립터 각각의 기여도를 정량화했으며, 롤·피치 보정이 없을 경우 매칭 정확도가 급격히 떨어지는 것을 확인했다.
전체적으로 TreeLoc은 학습‑프리, 객체‑중심, 기하학‑기반 접근을 통해 숲 환경 특유의 변동성(계절·조명·지형)에도 강인한 전역 위치 추정 솔루션을 제공한다. 다만, 나무가 거의 없거나 매우 조밀한 숲에서는 트리 추출 자체가 어려워질 수 있으며, 고도 차이가 큰 비탈 지형에서는 베이스 높이 추정 오차가 누적될 가능성이 있다. 향후 이러한 극한 상황을 보완하기 위해 고도 정보와 결합한 3‑D 디스크립터 확장이나, 드론·지상 로봇 간의 협업 매핑을 고려한 멀티모달 융합이 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기