지상 크라우드 데이터 활용 저고도 UAV 라디오맵 고정밀 전이학습 프레임워크
초록
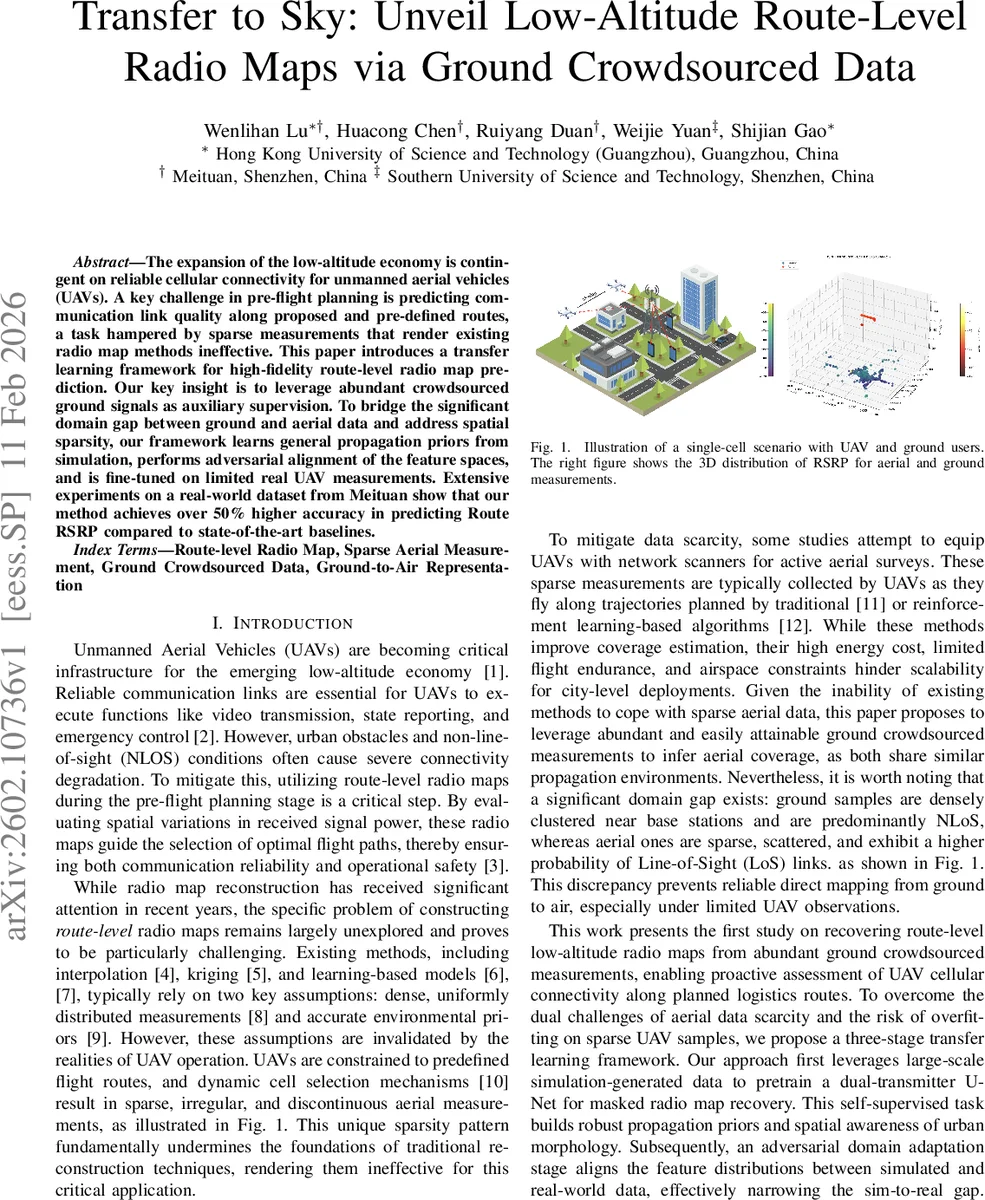
본 논문은 UAV가 비행하는 저고도 경로에서의 RSRP(수신 신호 강도) 예측을 목표로, 밀집된 지상 크라우드소싱 측정 데이터를 보조 지도(supervision)로 활용한다. 시뮬레이션 기반 대규모 합성 데이터로 전파 사전 지식을 학습하고, 적대적 도메인 정합(adversarial domain adaptation)으로 시뮬‑실 데이터 간 격차를 줄인 뒤, 제한된 실제 UAV 측정만으로 디코더를 미세조정한다. 제안 모델은 기존 보간·크리깅·학습 기반 라디오맵 방법에 비해 50% 이상 RMSE 감소를 달성한다.
상세 분석
이 연구는 저고도 UAV 운영에 필수적인 경로‑레벨 라디오맵을, 기존 방법이 요구하는 고밀도 측정이 불가능한 상황에서도 정확히 재구성할 수 있는 전이학습 파이프라인을 제시한다. 핵심 아이디어는 지상 사용자 단말이 제공하는 대규모 크라우드소싱 RSRP 데이터를 ‘보조 지도’로 삼아, UAV 측정의 극심한 희소성을 보완하는 것이다. 이를 위해 세 단계 학습 전략을 설계하였다. 첫 번째 단계에서는 OpenStreetMap과 DEM 데이터를 활용해 도시 3‑D 모델을 구축하고, Sionna 레이 트레이싱 엔진으로 대규모 합성 라디오맵을 생성한다. 여기서 마스크드 라디오맵 복원(self‑supervised) 과제를 통해 ‘masked radio map recovery’를 수행한다. 마스크는 송신기와의 거리별로 가중치를 달리해 실제 측정의 비균일성을 모방했으며, 이를 통해 네트워크는 대규모·미세 전파 특성을 동시에 학습한다. 두 번째 단계는 ADDA(Adversarial Discriminative Domain Adaptation)를 적용해 시뮬레이션 도메인과 실제 도메인의 잠재 표현을 정렬한다. 공유 인코더의 bottleneck 특징을 기준으로 도메인 판별기를 학습시키고, 타깃 인코더가 판별기를 속하도록 역전파함으로써 시뮬‑실 격차를 최소화한다. 이 과정에서 두 개의 송신기‑전용 디코더는 고정해 셀‑특이성을 유지한다. 마지막 단계에서는 실제 UAV 측정이 매우 희소하므로, 인코더는 고정하고 디코더만을 MSE 손실로 미세조정한다. 이렇게 하면 시뮬레이션에서 학습한 물리적 전파 사전지식은 보존되면서, 실제 환경의 미세한 변동에 맞춰 출력이 보정된다. 모델 아키텍처는 공유 인코더와 두 개의 트랜스미터‑전용 디코더를 갖는 dual‑transmitter U‑Net이며, CBAM(Convolutional Block Attention Module)을 삽입해 채널·공간 attention을 강화한다. 실험에서는 Meituan이 제공한 실제 UAV·지상 측정 데이터를 사용해, 기존 보간, Kriging, DeepRadioMap 등 7개 베이스라인 대비 RMSE를 51.9% 개선하였다. 특히, 시뮬레이션 사전학습 없이 바로 도메인 정합만 수행했을 때보다 성능이 크게 상승했으며, 디코더만 미세조정한 경우와 전체 파라미터를 모두 학습한 경우를 비교해도 제안 방식이 가장 효율적이었다. 이 논문은 (1) 시뮬레이션 기반 사전학습으로 전파 물리 모델을 내재화, (2) 적대적 정합으로 도메인 격차를 효과적으로 해소, (3) 희소한 실제 UAV 데이터만으로도 고정밀 라디오맵을 재구성할 수 있다는 점에서 기존 연구와 차별화된다. 다만, 현재는 단일 셀(단일 Cell‑ID) 환경에 국한되어 있으며, 다중 셀·다중 주파수 상황이나 동적 트래픽 변동을 고려한 확장은 향후 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기