다양한 역할 로봇 협업을 측정하는 새로운 메트릭
초록
**
본 논문은 이질적인 로봇 팀이 부분 관측과 시간적 역할 의존성을 갖는 파괴형 포식(Foraging) 작업을 수행할 때, 단순한 작업 성공률을 넘어 협업의 효율성·조정·공정성·민감성을 정량화할 수 있는 3계층 메트릭 체계를 제안한다. 제안된 메트릭은 기본 지표, 팀 간 지표, 팀 내 지표로 구분되며, 수중 플라스틱 청소 시나리오에 적용해 학습 기반·휴리스틱 알고리즘을 비교 평가한다.
**
상세 분석
**
이 논문은 기존 다중 에이전트 포식 연구가 주로 최종 수집량이나 완료 시간과 같은 단일 성능 지표에 의존해 왔다는 점을 비판한다. 저자들은 “협업”이라는 복합 현상을 정량화하기 위해, (1) Primary Metrics – 자원 제거 효율, 모델 정확도, 에너지 사용량 등 개별 에이전트와 팀 전체의 기본 성능을 측정하는 지표, (2) Inter‑Team Metrics – 스카우트 팀과 파괴 팀 사이의 정보 전달 지연, 의존도, 협업 강도 등을 나타내는 상호작용 지표, (3) Intra‑Team Metrics – 팀 내부의 작업 분배 균형, 중복 탐색 비율, 공정성(Fairness) 및 로버스트성(Robustness) 등을 평가하는 지표로 구성된 3단계 메트릭 체계를 설계하였다.
특히, Dependency Index와 Information Redundancy Ratio는 부분 관측 상황에서 한 팀이 제공하는 정보가 다른 팀의 행동에 얼마나 직접적인 영향을 미치는지를 수치화한다. 이는 시간적 역할 의존성이 강한 시나리오(예: 스카우트가 탐색한 뒤 파괴기가 바로 행동을 전환해야 하는 경우)에서 중요한 평가 요소가 된다. 또한 Fairness Coefficient는 각 에이전트가 소비한 에너지 대비 기여한 제거량을 비교해, 이질적인 하드웨어 사양을 가진 로봇들 사이의 작업 부하가 얼마나 균등하게 분배되는지를 판단한다.
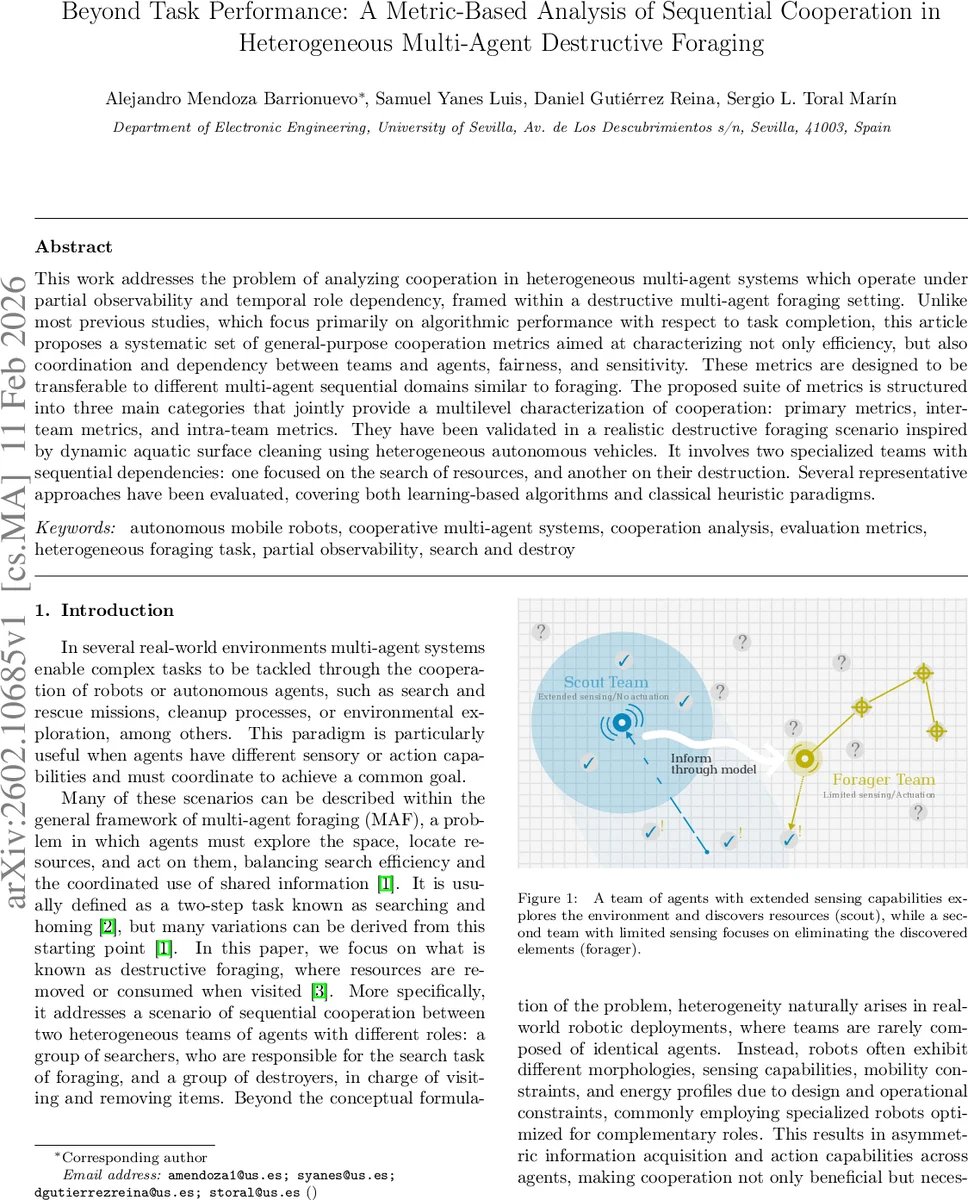
실험에서는 수중 플라스틱 청소라는 현실적인 파괴형 포식 문제를 그래프 기반 환경으로 모델링하고, 두 종류의 로봇(고속·광범위 센서 스카우트, 저속·제한 센서 파괴기)으로 구성된 팀을 구성하였다. 여기서 Extended Sensing과 Limited Actuation이라는 두 가지 제약을 동시에 고려했으며, 에이전트는 제한된 이동 횟수(에너지 제한) 내에서 임무를 수행한다.
알고리즘 비교에서는 (① 중앙집중식 강화학습 기반 협업, ② 분산형 휴리스틱(레비 워크 + 스티그머시), ③ 역할 기반 규칙 기반 전략) 세 가지 접근법을 적용하였다. 결과는 기존의 “총 제거량”만을 기준으로 평가했을 때는 강화학습이 가장 높은 성능을 보였지만, 제안된 메트릭을 모두 고려하면 Information Redundancy가 과도하게 높아 팀 간 의존도가 약화되고, Fairness가 저하되는 문제가 드러났다. 반면, 레비 워크 기반 휴리스틱은 정보 중복이 낮고, 에너지 대비 제거 효율이 높으며, 팀 내부 공정성도 우수했다.
또한, Robustness Test에서 일부 스카우트가 고장 나는 상황을 시뮬레이션했을 때, Dependency Index가 낮은 알고리즘(분산형 휴리스틱)이 빠르게 대체 경로를 찾아 성능 저하를 최소화했으며, Sensitivity Analysis를 통해 센서 범위와 이동 속도 파라미터가 협업 지표에 미치는 영향을 정량화하였다. 이러한 분석은 단순히 “얼마나 빨리 청소했는가”를 넘어, 실제 운영 환경에서 시스템 설계자가 어떤 역할 배분이 가장 효율적이며, 장애 발생 시 어느 정도 복원력을 기대할 수 있는가를 판단하는 근거를 제공한다.
결론적으로, 논문은 다중 에이전트 시스템의 협업을 다차원적으로 평가할 수 있는 메트릭 프레임워크를 제시함으로써, 알고리즘 개발 단계에서 성능 트레이드오프(효율 vs. 공정성, 의존성 vs. 로버스트성)를 명시적으로 탐색할 수 있게 한다. 이는 향후 로봇 수색·구조, 환경 정화, 자원 채취 등 다양한 순차 협업 시나리오에 적용 가능한 일반화된 평가 도구로 활용될 가능성을 시사한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기