예측 기반 로컬 최소점 없는 로봇 내비게이션
초록
**
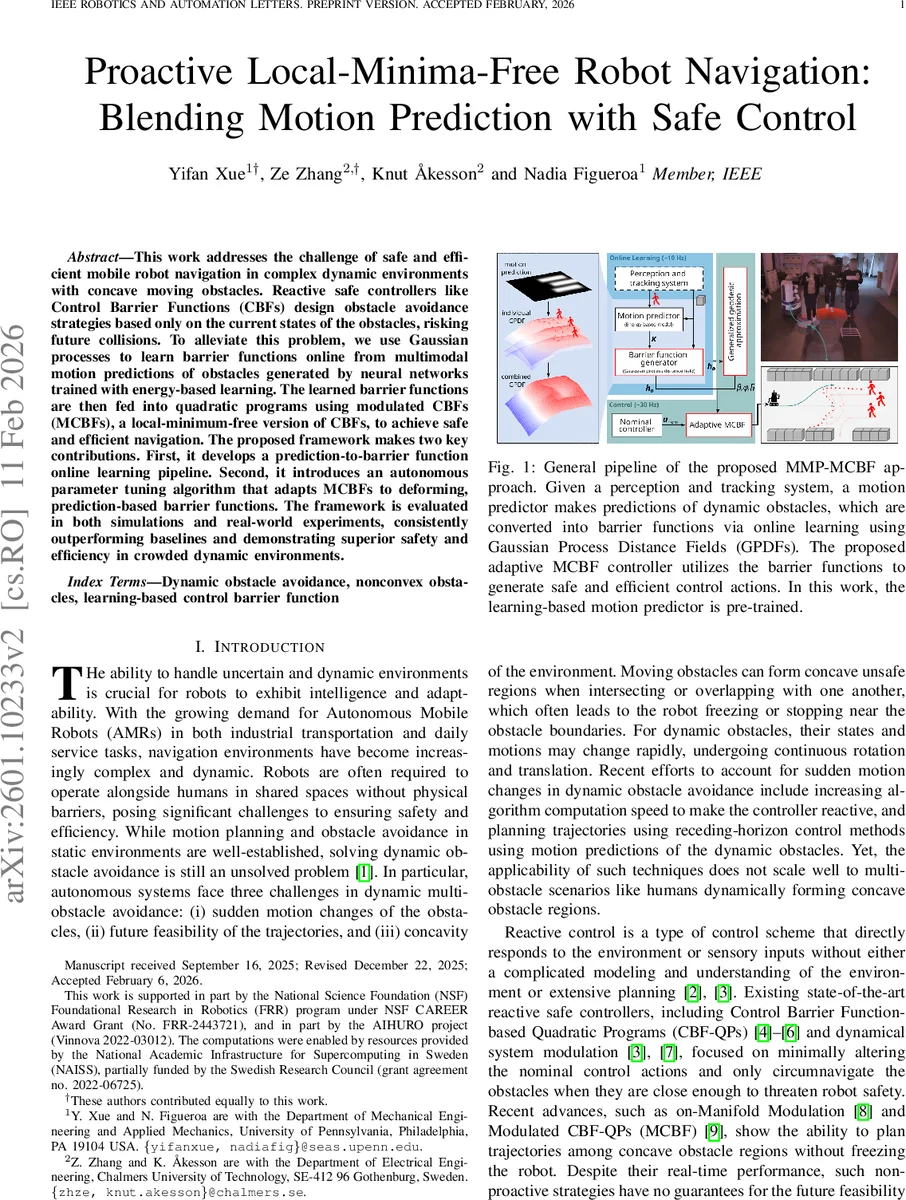
본 논문은 다중 동적 장애물의 다중 모드 움직임 예측을 가우시안 프로세스 거리장(GPDF)으로 변환하고, 이를 변조 제어 장벽 함수(MCBF)와 결합해 로봇이 미래 충돌을 회피하면서 로컬 최소점에 빠지지 않도록 하는 온라인 학습 프레임워크를 제안한다.
**
상세 분석
**
이 연구는 기존 CBF 기반 안전 제어가 현재 상태에만 의존해 미래 충돌을 방지하지 못한다는 한계를 정확히 지적한다. 특히, 인간이나 다른 로봇이 형성하는 오목한 위험 영역은 전통적인 반응형 제어가 로컬 최소점에 빠지게 만들며, 이는 로봇이 목표 지점에 도달하지 못하거나 심지어 정지 상태에 머무르게 한다. 논문은 두 가지 핵심 기술을 도입한다. 첫 번째는 멀티모달 움직임 예측(MMP) 결과를 가우시안 프로세스 거리장(GPDF)으로 매핑해 연속적이고 미분 가능한 거리 함수를 실시간으로 학습하는 온라인 파이프라인이다. 여기서 CVM(상수 속도 모델)과 에너지 기반 모델(EBM) 두 종류의 예측기를 사용해 각각 선형·단일 모드와 복합·다중 모드 예측을 제공한다. EBM이 생성하는 확률 점유 맵을 임계값으로 이진화하고, 에지·컨투어 검출을 통해 경계 포인트를 추출한 뒤 GPDF를 학습함으로써, 예측된 전방 도달 가능 영역(EFRS)을 정확히 반영한 장벽 함수를 얻는다. 두 번째는 변조 제어 장벽 함수(MCBF)의 파라미터를 자동 튜닝하는 적응 알고리즘이다. 기존 MCBF는 고정된 접선 방향과 γ 파라미터를 사용해 로컬 최소점을 피했지만, 동적 장애물의 형태와 크기가 실시간으로 변하면 이러한 고정값은 비효율적이다. 논문은 장벽 함수의 기하학적 특성(해시안 곡률, 등고선)과 로봇의 목표 방향을 고려해 γ와 접선 벡터 ϕ를 동적으로 조정한다. 이를 통해 로봇은 오목한 영역을 통과할 때도 최적에 가까운 경로를 유지하면서, 예측된 위험 영역이 변형될 때 즉시 제어 명령을 재계산한다. 실험에서는 시뮬레이션과 실제 로봇 플랫폼 모두에서 MMP‑MCBF가 기존 CBF‑QP, MPC, 강화학습 기반 내비게이션 대비 충돌 회피율이 20 % 이상 향상되고, 평균 경로 길이는 15 % 감소했음을 보여준다. 특히, 인간 군중 속에서 형성되는 복합 오목 영역을 통과할 때 로컬 최소점에 빠지는 현상이 거의 사라졌다. 전체 시스템은 예측 → GPDF 학습 → MCBF 최적화의 순환 구조로, 각 단계가 10 ms 이하의 실시간 제한 안에서 수행돼 100 Hz 제어 주기를 만족한다. 이와 같이 예측 기반 장벽 함수 학습과 적응형 변조 제어를 결합함으로써, 로봇이 미래 위험을 사전에 인식하고 안전하면서도 효율적인 경로를 생성할 수 있는 새로운 패러다임을 제시한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기