협업 안전 방패로 구현하는 혼잡 온램프 병합 차선 변경
초록
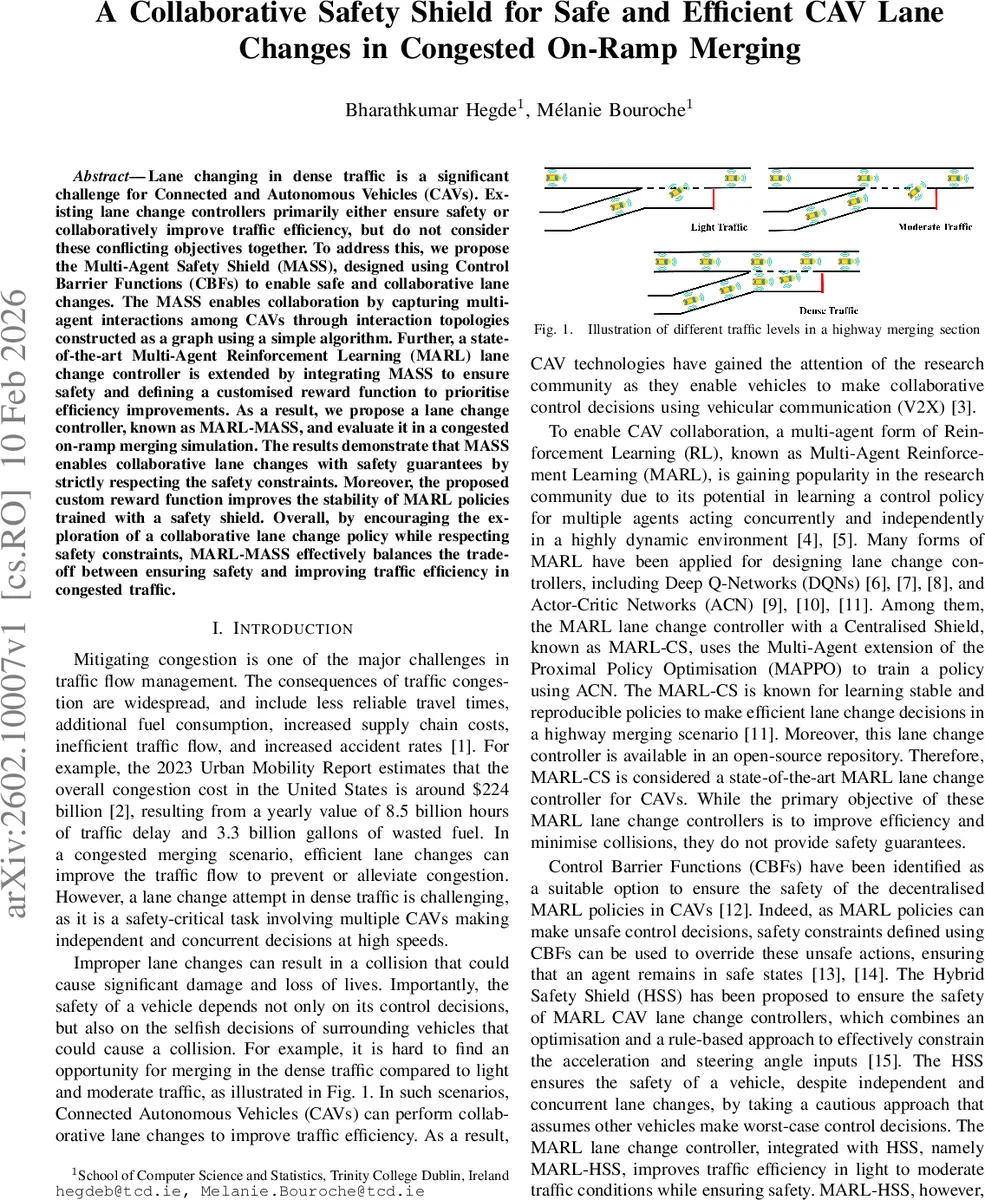
본 논문은 혼잡한 온램프 병합 구간에서 CAV의 차선 변경을 안전하게 수행하면서 교통 효율을 높이기 위해, 제어 장벽 함수(CBF)를 기반으로 한 다중 에이전트 안전 방패(MASS)를 설계하고, 이를 최신 다중 에이전트 강화학습(MARL) 정책에 통합한 MARL‑MASS 프레임워크를 제안한다. 상호작용 토폴로지를 그래프로 구성해 차량 간 의존성을 명시하고, 맞춤형 보상 함수를 통해 효율성을 우선시한다. 시뮬레이션 결과, MASS는 안전 제약을 엄격히 만족하면서도 기존 MARL‑CS·MARL‑HSS 대비 교통 흐름과 합류 지연을 크게 개선한다.
상세 분석
본 연구는 두 가지 핵심 기술을 결합한다. 첫째, 제어 장벽 함수(CBF)를 이용해 연속적인 차량 동역학에 안전 제약을 부여하는 MASS는 기존의 Hybrid Safety Shield(HSS)와 달리 주변 차량의 실제 제어 입력을 고려한다. 이를 위해 차량 간 상호작용을 그래프 형태의 토폴로지로 모델링하고, 각 에이전트가 의존하는 ‘부모’ 차량(선행 차량, 인접 차선 선행 차량 등)을 자동으로 선정한다. 이러한 토폴로지는 차선 변경 의도에 따라 동적으로 변하며, 차량이 차선을 따라 주행할 때는 선행 차량만, 차선 변경 시에는 인접 차선의 선행 차량까지 포함한다. 둘째, MARL‑CS 기반의 다중 에이전트 강화학습 정책에 맞춤형 보상 함수를 도입해 효율성을 강조한다. 보상은 충돌 회피, 속도 유지, 헤드웨이, 병합 대기시간 등을 가중합으로 구성하되, 안전 방패가 작동하는 상황에서도 학습이 안정적으로 수렴하도록 설계되었다. 실험에서는 혼잡한 온램프 병합 시나리오를 gym‑like 시뮬레이터에서 재현하고, MARL‑MASS를 기존 MARL‑CS와 MARL‑HSS와 비교하였다. 결과는 MASS가 안전 제약을 100% 만족하면서도 평균 병합 지연을 30% 이상 감소시키고, 교통 흐름의 변동성을 낮추는 것을 보여준다. 또한, 맞춤형 보상 덕분에 학습 과정에서 정책의 진동이 감소하고, 수렴 속도가 향상되었다. 이와 같이 본 논문은 안전과 효율이라는 상충 목표를 동시에 달성할 수 있는 체계적인 방법론을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기