그룹 스털링 복합체의 연결성 및 셀 구조 연구
초록
본 논문은 그래프 G 위에 로봇을 색깔별 그룹으로 배치하고, 같은 색 로봇은 최소 한 개의 열린 간선으로 구분되는 제약을 두는 새로운 구성공간 (S_{\vec r}(G)) (그룹 스털링 복합체)를 정의한다. 주요 결과로는 색깔이 세 개 이상이면 언제든 경로 연결됨을 보였으며, 특정 색벡터에 대해 0‑셀·1‑셀 개수를 정확히 계산한다.
상세 분석
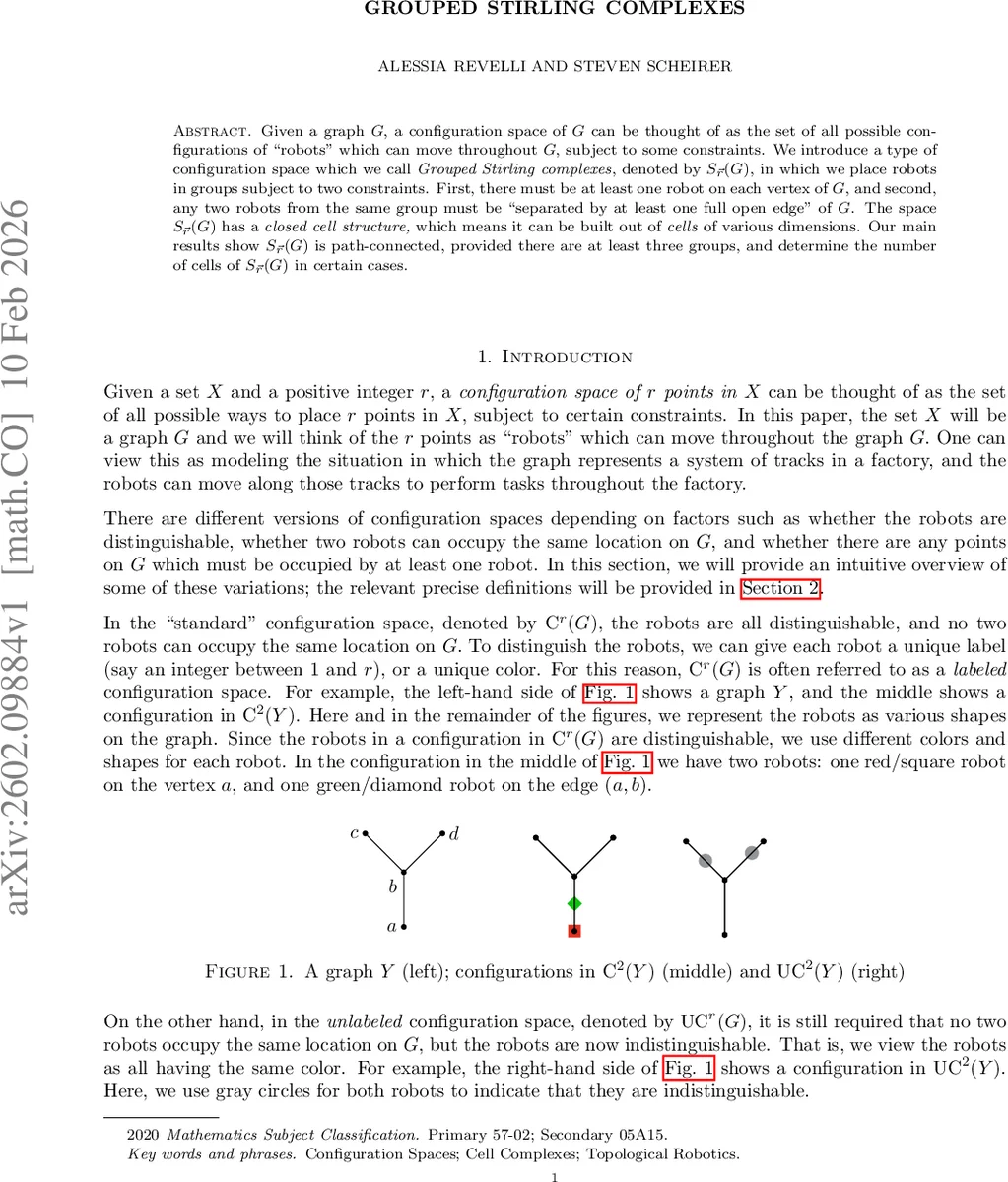
논문은 먼저 기존의 구성공간 (C_r(G),; UC_r(G),; D_r(G),; UD_r(G)) 을 복습하고, 스털링 복합체 (S_r(G)) 가 로봇의 중복 배치를 허용하면서 각 정점에 최소 하나의 로봇이 있어야 하는 제약을 갖는 점을 강조한다. 이를 일반화하여 색벡터 (\vec r=(\ell_1,\dots,\ell_r)) 를 도입, 색 (i) 에 속하는 (\ell_i)개의 로봇이 그래프 상에 배치되는 모든 경우를 모은 집합을 (S_{\vec r}(G)) 라 정의한다. 핵심 제약은 (c) “같은 색 로봇은 최소 한 개의 열린 간선으로 떨어져야 한다”이며, 이는 기존의 (D_r(G)) 조건과 동일하지만 색마다 독립적으로 적용된다.
셀 구조는 각 색별로 정점·폐간선의 선택을 (\ell_i)개씩 택한 튜플 (c=(c_1,\dots,c_r)) 으로 정의한다. 셀의 차원은 선택된 폐간선(즉, 로봇이 내부에 있을 수 있는 간선)의 총 개수이다. 따라서 0‑셀은 모든 로봇이 정점에 놓인 경우, 1‑셀은 하나의 색에 속한 로봇이 간선 내부에 위치하는 경우 등으로 해석된다. 이 정의는 셀 복합체가 큐빅(정육면체) 구조를 갖게 함을 보이며, 셀 간의 경계 관계는 간선 내부 위치를 정점으로 이동시키는 자연스러운 연산으로 기술된다.
연결성 측면에서 저자는 색의 수가 세 개 이상이면 (S_{\vec r}(G)) 가 항상 경로 연결임을 증명한다 (Theorem 3.10). 증명은 먼저 “비자명 색벡터”—즉 (\sum_i \ell_i>n)이고 각 (\ell_i<n)—를 가정하고, 임의의 두 구성 사이에 색별 로봇을 단계적으로 이동시켜 연결함을 보인다. 핵심 아이디어는 (i) 한 색이 전체 정점을 차지하는 경우는 다른 색들의 자유로운 움직임을 허용하므로 연결성이 자명하고, (ii) 색이 두 개뿐인 경우에는 특정 그래프(예: 별형 그래프)에서 연결성이 깨질 수 있음을 예시로 제시한다. 따라서 최소 세 색이 필요함을 강조한다.
셀 개수에 대한 정량적 결과는 두 가지 경우에 대해 명시된다. 첫 번째는 색벡터 (\vec r=(2,1,\dots,1))인 경우로, 0‑셀 수는 (n!,(n^2+n-2)/4), 1‑셀 수는 (m,(n-1)!,(n^2+n-4)/2)이며 2‑셀 이상은 존재하지 않는다 (Theorem 4.1). 여기서 (n=|V(G)|, m=|E(G)|)이다. 두 번째는 모든 색이 동일하게 ((n-1))개씩인 경우 (\vec r=(n-1,\dots,n-1)) (색 수 (r\ge2))에 대해, 셀 개수는 정점들의 차수 (\deg(v))와 조합계수 (\binom{r}{i})를 이용한 복합식으로 주어진다 (Theorem 4.4). 이 식은 차수 (i)가 (r) 이하일 때만 비제로이며, 차수 (r)인 셀은 그래프 전체 차수의 곱으로 표현된다. 이러한 결과는 셀 구조가 그래프의 토폴로지와 색벡터의 조합에 어떻게 민감하게 반응하는지를 보여준다.
마지막으로, 저자는 비자명 색벡터가 아닌 경우(예: (\sum_i \ell_i=n) 혹은 (\ell_i=n)인 경우) 복합체가 이산적이거나 다른 복합체와 위상동형임을 언급한다. 이는 연구 범위를 비자명 경우에 한정함으로써 의미 있는 위상적 현상을 탐구한다는 전략적 선택이다. 전체적으로 논문은 새로운 구성공간 모델을 정의하고, 그 위상적 연결성 및 셀 계수를 정확히 파악함으로써 그래프 위 로봇 시스템의 복합적인 제약을 수학적으로 정형화하는 데 기여한다.
댓글 및 학술 토론
Loading comments...
의견 남기기