스무딩 오차를 이용한 인증 가능한 접촉 조작 정책 합성
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
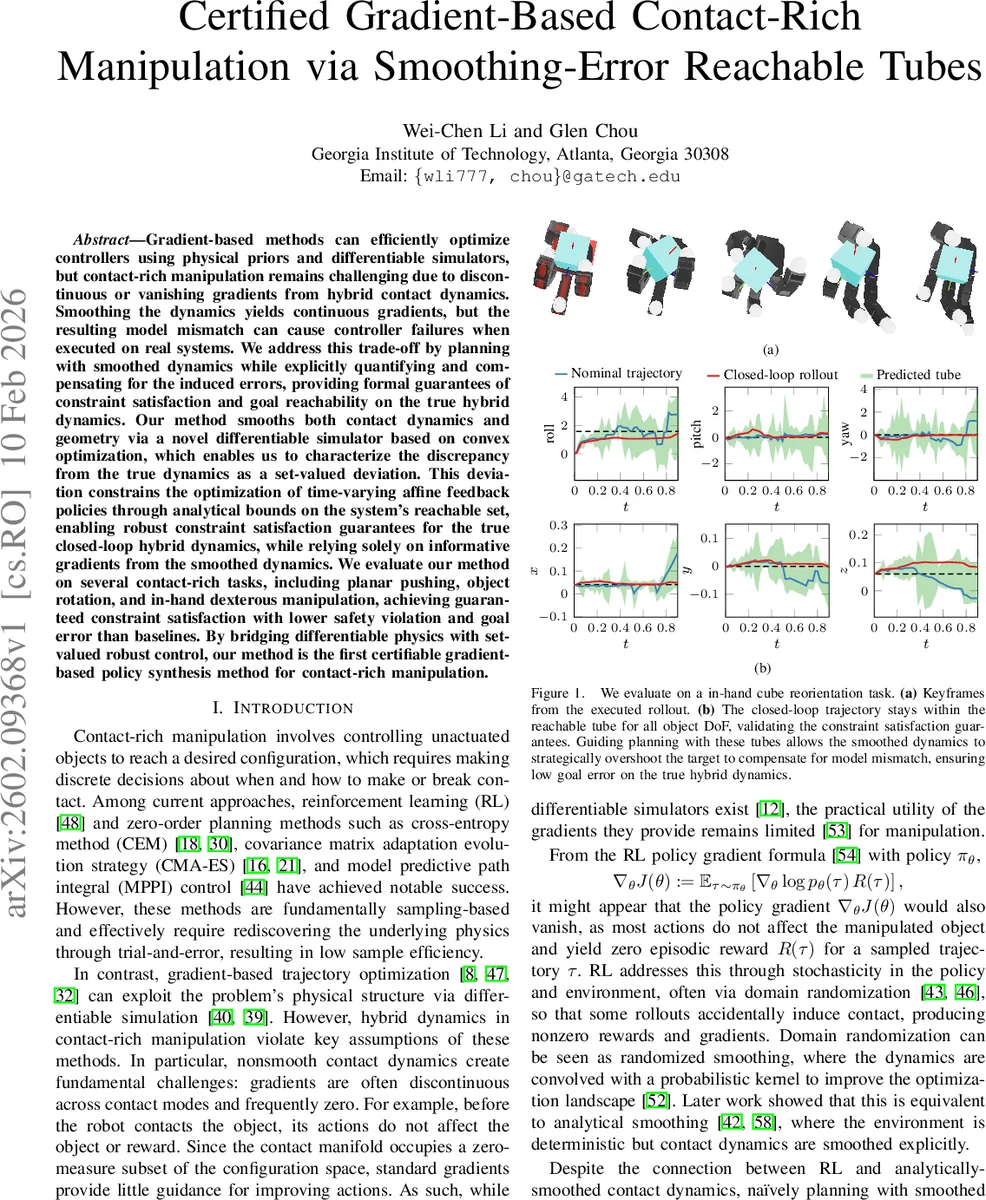
본 논문은 접촉이 많은 로봇 조작 문제에서, 연속적인 그래디언트를 제공하는 스무딩된 물리 시뮬레이터를 활용하면서, 스무딩으로 발생하는 모델 오차를 집합값 형태로 정량화한다. 이를 통해 시간 가변 선형 피드백 정책에 대한 도달 가능 튜브를 분석하고, 실제 하이브리드 접촉 동역학에 대해 제약 만족과 목표 도달을 보장하는 최초의 인증 가능한 그래디언트 기반 정책 합성 방법을 제시한다.
상세 분석
이 연구는 접촉 기반 조작에서 흔히 마주치는 비연속·제로 그라디언트 문제를 두 단계로 해결한다. 첫 번째 단계는 접촉 및 기하학을 부드럽게 하는 새로운 미분 가능 시뮬레이터를 구축하는 것이다. 기존의 LCP 기반 접근법과 달리, 저자는 컨벡스 콘벡스 프로그램(특히 로그 배리어를 이용한 보완성 완화)을 이용해 접촉 힘과 거리 제약을 연속적으로 근사한다. 이 구조는 KKT 조건을 통해 상태·입력에 대한 미분 가능성을 보장하고, 스무딩 파라미터 κ에 대한 민감도(∂λ/∂κ)까지 직접 계산할 수 있게 한다.
두 번째 단계는 스무딩으로 인한 모델 오차를 집합값 함수 Eκ(x,u)·w ( w∈
댓글 및 학술 토론
Loading comments...
의견 남기기