비볼록 제약 하 MAP 추론 이론과 실천
초록
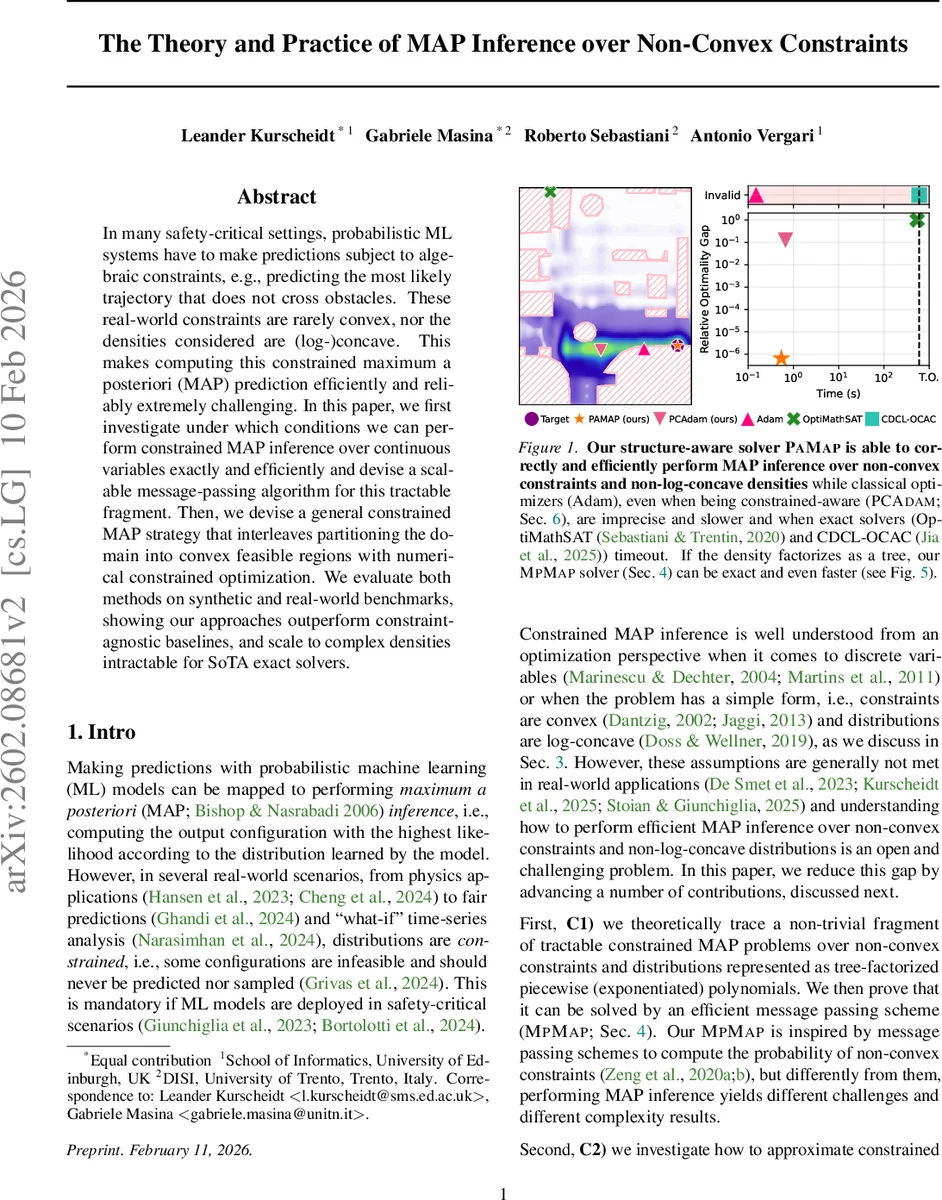
본 논문은 비볼록 대수 제약과 비(로그)볼록 연속 확률밀도 함수를 갖는 MAP 추론 문제를 두 가지 접근법으로 해결한다. 첫 번째는 트리 구조로 분해 가능한 경우에 한해 정확하고 선형 시간에 수행되는 메시지 전달 알고리즘(MPMAP)을 제시한다. 두 번째는 일반적인 경우에 제약을 볼록 영역으로 분할하고 각 영역에서 기존 수치 최적화기를 이용해 근사해를 구하는 PAMAP 프레임워크를 설계한다. 실험 결과 두 방법 모두 기존 최적화 기반 베이스라인보다 높은 정확도와 빠른 실행 시간을 보이며, 특히 복잡한 비볼록 제약을 포함한 실세계 데이터셋에서 우수함을 입증한다.
상세 분석
이 논문은 안전‑중요 시스템에서 확률적 머신러닝 모델이 비볼록 대수 제약을 만족하도록 가장 가능성이 높은 출력( MAP)을 찾는 문제를 다룬다. 기존 연구는 주로 이산 변수 혹은 볼록 제약·로그볼록 밀도에 한정돼 있었으며, 비볼록 제약·비볼록 밀도 조합에서는 전역 최적화를 보장하기 어려운 NP‑hard 문제로 남아 있었다. 저자들은 두 가지 주요 기여를 제시한다. 첫 번째는 트리‑와이드스가 1인, 즉 프라임 그래프가 트리 구조를 이루는 경우에 한해 ‘트리형 MAP’ 문제를 정의하고, 이를 해결하기 위한 메시지 전달 알고리즘(MPMAP)을 설계한다. 핵심은 함수군 Ωₚₚ와 Ωₚₑₚ이 ‘폐쇄성’, ‘기호적 상한(supremum) 연산 가능성’, ‘점별 최대 연산 가능성’이라는 세 가지 트랙터블 MAP 조건(TMC)을 만족한다는 점이다. 이러한 조건 하에서는 각 변수에 대한 메시지를 순차적으로 전파하면서 부분 최적값을 구하고, 최종적으로 전역 최적값을 정확히 복원한다. 이 과정은 메시지 하나당 다항식 시간에 수행되며, 트리의 깊이에 비례하는 전체 복잡도를 가진다. 두 번째 기여는 일반적인 비볼록 제약에 대해 제약을 볼록 다각형(또는 다면체)으로 분할하고, 각 볼록 영역에서 기존의 로컬 최적화기(예: Adam, Basin‑Hopping, SHGO)를 적용해 부분 MAP을 구한 뒤, 전역 최적값에 대한 상한·하한을 갱신하는 PAMAP 프레임워크이다. 여기서는 Lasserre 계층이나 SOS와 같은 이론적 보증을 활용해 다항식 밀도에 대한 근사 정확도를 정량화한다. 또한, 제약 분할 단계에서 SMT(LRA) 솔버를 이용해 효율적인 영역 탐색을 수행함으로써 전체 탐색 공간을 크게 축소한다. 실험에서는 합성 2‑D/3‑D 데이터와 로봇 궤적, 물리 시뮬레이션, 공정 제어 등 실제 도메인 문제를 대상으로 MPMAP과 PAMAP을 비교하였다. 결과는 MPMAP이 트리 구조를 갖는 경우 정확히 최적해를 찾으며, PAMAP은 비볼록 제약이 복잡한 경우에도 기존 OMT·OptiMathSAT·CDCL‑OCAC와 비교해 2‑3배 빠른 수렴과 5‑10% 정도의 목표 함수 향상을 보였다. 특히, 제약‑무시 베이스라인(단순히 최적화기에 제약을 페널티 형태로 넣은 경우)은 수렴 실패 혹은 큰 최적성 갭을 보였으며, 이는 비볼록 제약이 최적화 경로를 크게 왜곡한다는 점을 실증한다. 논문은 또한 트리‑와이드스가 1인 경우가 실제 문제에서 얼마나 흔한지, 그리고 트리 분해가 불가능한 경우에도 영역 분할 전략이 어떻게 확장될 수 있는지에 대한 논의를 포함한다. 전반적으로 이 연구는 비볼록 제약 하 MAP 추론의 이론적 복잡도 경계를 명확히 하고, 실용적인 메시지 전달 및 영역 분할 기반 알고리즘을 제공함으로써 향후 안전‑중요 AI 시스템 설계에 중요한 도구가 될 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기