입력 쉐이핑으로 모바일 크레인 급회전 시 동적 전복 방지
초록
본 논문은 모바일 크레인의 급회전 시 발생하는 페이로드 진동을 최소화하기 위해, 로프 길이만을 이용해 설계된 MUMZV 입력 쉐이핑 기법을 적용한다. 시뮬레이션과 실험 결과, 쉐이핑을 적용하면 잔여 진동이 크게 감소하고, 전복 위험 없이 회전 속도를 38 % 이상 높일 수 있음을 보여준다.
상세 분석
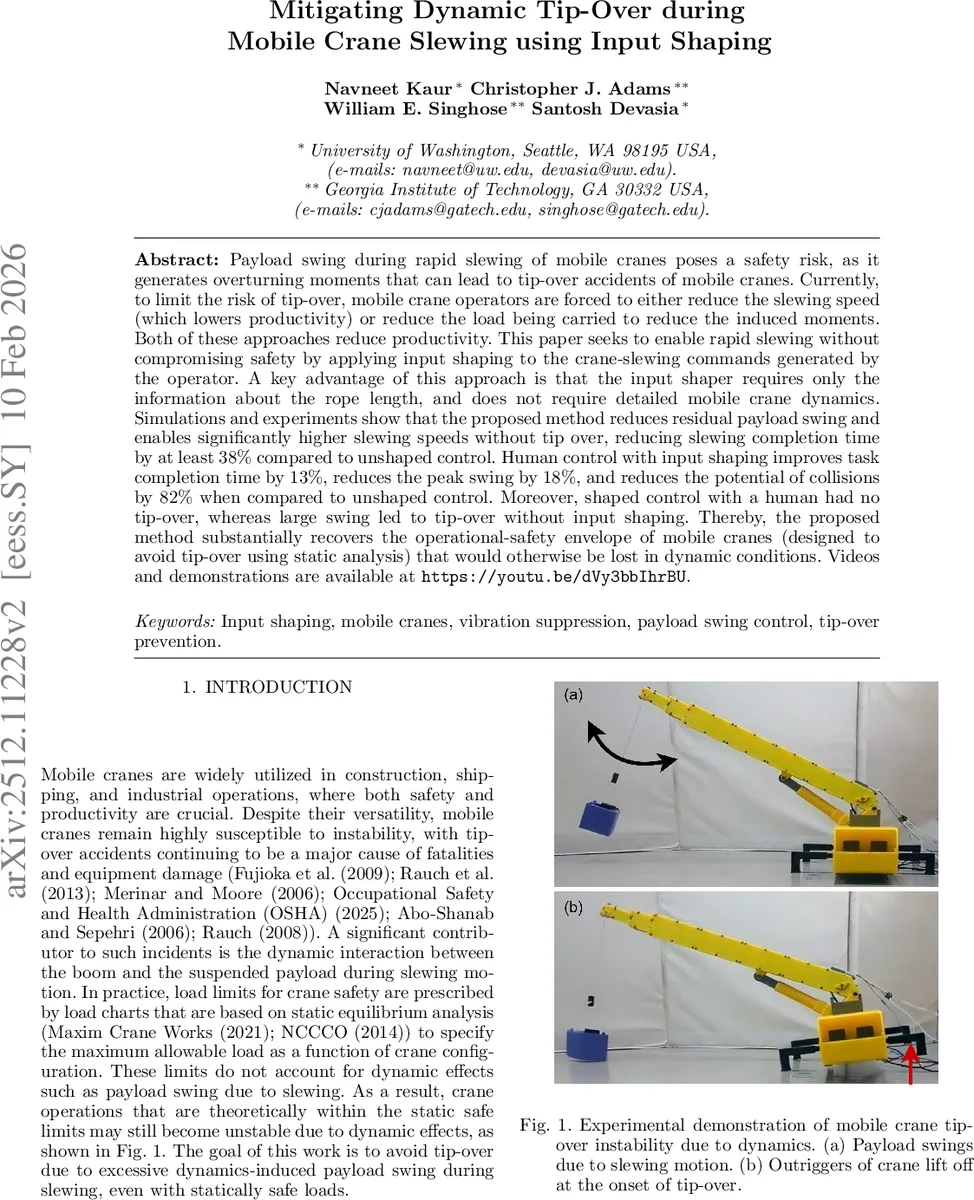
모바일 크레인은 작업 효율성을 위해 빠른 회전이 요구되지만, 회전 중 페이로드가 진동하면 전복 모멘트가 급증해 안전 사고로 이어진다. 기존의 안전 한계는 정적 하중 차트에 기반해 설계되었으며, 동적 효과를 반영하지 못한다. 논문은 이러한 문제를 ‘입력 쉐이핑(input shaping)’이라는 간단하면서도 효과적인 제어 방법으로 해결한다. 핵심 아이디어는 회전 가속도 명령을 MUMZV(Modified Unity‑Magnitude Zero‑Vibration) 형태의 임펄스 시퀀스로 변환해, 시스템 고유진동수 ωₙ=√(g/l)와 일치하는 주파수 성분을 억제하는 것이다. 이때 필요한 파라미터는 로프 길이 l만 알면 되므로, 복잡한 크레인 동역학 모델이 필요 없으며, 현장 적용이 용이하다.
입력 쉐이핑은 가속도 영역에서 수행되며, 원래 조이스틱 입력 r(t)를 세 개의 임펄스 Aᵢ·δ(t‑tᵢ)와 컨볼루션해 새로운 가속도 u(t)를 만든다. 이후 η라는 토크‑관성 비율을 곱해 실제 회전 가속도로 변환하고, 적절히 적분·포화(saturation)하여 속도 명령 ˙α_ref(t)를 생성한다. 이 파이프라인은 잔여 진동을 이론적으로 0으로 만들면서도 속도 제한 V_L을 초과하지 않도록 설계된다.
시뮬레이션은 PyBullet 기반의 완전 3차원 크레인 모델을 사용했으며, 실제 실험 장비와 동일한 질량·길이 파라미터를 적용하였다. 다양한 붐 반경(R)과 하중(m) 조합에 대해 90° 회전을 수행하면서, 쉐이핑 적용 전후의 최대 안전 회전 속도와 진동 각을 비교했다. 결과는 쉐이핑이 적용된 경우 최대 안전 속도가 평균 38 % 상승하고, 작업 시간은 동일하거나 감소했으며, 피크 진동 각도는 약 18 % 감소했다는 점을 보여준다. 특히 인간 운전자가 조작할 때도 쉐이핑을 적용하면 전복 없이 작업을 완료할 수 있었으며, 충돌 위험은 82 % 감소하였다.
실험에서는 스케일된 크레인에 로프 길이 0.5715 m, 하중 0.5 kg을 달고, 동일한 90° 회전을 수행하였다. 측정된 회전 속도와 진동 데이터는 시뮬레이션과 높은 일치성을 보였으며, 입력 쉐이핑이 실제 현장에서도 실시간으로 적용 가능함을 입증했다.
이 연구의 주요 공헌은 (1) 복잡한 모델링 없이 로프 길이만으로 설계 가능한 입력 쉐이핑 기법 제시, (2) 인간‑인‑루프(human‑in‑the‑loop) 환경에서 안전성을 크게 향상시킨 점, (3) 정적 안전 차트가 제공하지 못하는 동적 안전 여유를 회복했다는 점이다. 한계점으로는 로프 길이가 변하거나 외부 풍동 등 추가 외란이 존재할 경우 쉐이핑 파라미터 재조정이 필요하다는 점이며, 향후 연구에서는 적응형 쉐이핑 및 다중 자유도(예: 붐 피치·요) 제어와의 통합을 제안한다.
댓글 및 학술 토론
Loading comments...
의견 남기기