동시 보정 기반 잡음 공분산·기구 파라미터 최적화로 구현하는 차세대 다족 로봇 상태 추정
초록
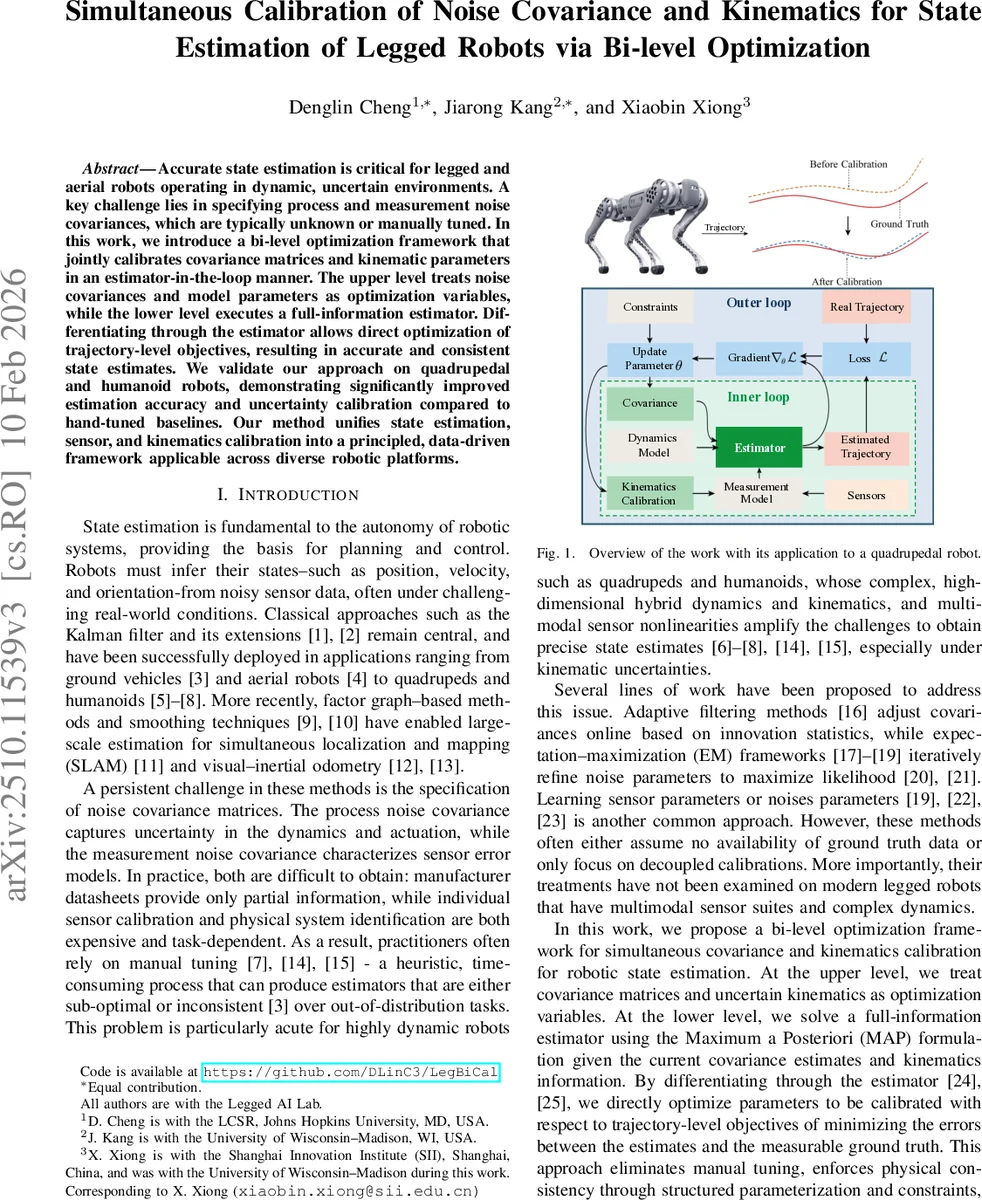
본 논문은 잡음 공분산 행렬과 로봇 기구 파라미터를 동시에 보정하기 위해, 추정기를 내부 루프에 포함한 이중 최적화(framework)를 제안한다. 상위 레벨에서는 공분산과 기구 파라미터를 변수로 두고, 하위 레벨에서는 현재 파라미터에 기반한 MAP 기반 전정보 추정(FIE)을 수행한다. 추정 과정을 자동 미분하여 상위 목적함수(추정 궤적과 실제 궤적 간 오차)를 직접 최소화함으로써, 수동 튜닝 없이도 정확하고 일관된 상태 추정과 불확실성 캘리브레이션을 달성한다. 실험은 사족보행 로봇과 인간형 로봇에 적용했으며, 기존 수동 튜닝 대비 추정 오차와 불확실성 일치도가 크게 개선되었다.
상세 분석
이 연구는 로봇 상태 추정에서 가장 오래된 난제 중 하나인 프로세스·측정 잡음 공분산의 정확한 설정 문제를 근본적으로 해결한다는 점에서 의미가 크다. 기존 방법들은 주로 경험적 튜닝, 혁신 통계 기반 적응 필터링, 혹은 EM‑형식의 최대우도 추정에 의존했으며, 이들 모두 센서별 혹은 모델별로 독립적인 보정을 전제로 한다. 반면 본 논문은 공분산과 기구 파라미터를 하나의 최적화 변수 집합으로 묶어, 전체 추정 파이프라인을 “추정기‑인‑더‑루프”(estimator‑in‑the‑loop) 형태로 만든다.
구체적으로, 하위 레벨은 현재 파라미터(공분산 Q, R 및 기구 파라미터 θ_k)를 고정하고, MAP 기반 전정보 추정(FIE)을 풀어 전체 궤적 (\hat{x}_{0:T})을 얻는다. 이때 프로세스와 측정 잡음은 각각 정규분포 (w_k\sim\mathcal N(0,Q_k)), (n_k\sim\mathcal N(0,R_k)) 로 모델링되며, 기구 파라미터는 발 위치 오프셋 등으로 표현된다. 중요한 점은 이 최적화가 전통적인 EKF나 MHE와 달리 전체 시간 구간에 대한 비선형 최적화 문제이므로, 해는 전역 최적에 가깝게 수렴한다는 것이다.
상위 레벨은 (\hat{x}{0:T}(\theta))와 외부 모션 캡처 등으로부터 얻은 ground‑truth (x^{GT}{0:T}) 사이의 손실 (L(\hat{x},x^{GT}))을 최소화한다. 손실은 위치·속도·자세 등 다중 항목의 제곱 오차 합으로 정의되며, 필요에 따라 불확실성 일치도(예: NIS, NEES)도 포함할 수 있다. 핵심은 하위 레벨 최적화 결과를 자동 미분(예: 역전파, 연산 그래프)으로 상위 레벨에 전달한다는 점이다. 이를 위해 논문은 최신 차분 가능 최적화 기법(
댓글 및 학술 토론
Loading comments...
의견 남기기