무작위 인구 제어 문제의 최적 해결
초록
본 논문은 동일한 유한 상태 마코프 결정 과정을 복제한 다수의 에이전트 집단에 대해, 컨트롤러가 전역 행동을 선택하고 각 에이전트가 독립적으로 균등 무작위로 전이하도록 하는 ‘무작위 인구 제어 문제’를 다룬다. 기존에 결정 가능성만 알려졌던 이 문제의 복잡도 상한을 제시하여, 문제를 EXPTIME‑complete임을 증명한다. 핵심은 ‘심볼릭 구성’과 ‘동적 흐름 문제’를 이용해 다항식‑정의 가능한 승리 아레나를 찾고, 이를 다항식 공간에서 검증함으로써 전체 알고리즘을 지수 시간 안에 수행할 수 있음을 보이는 것이다.
상세 분석
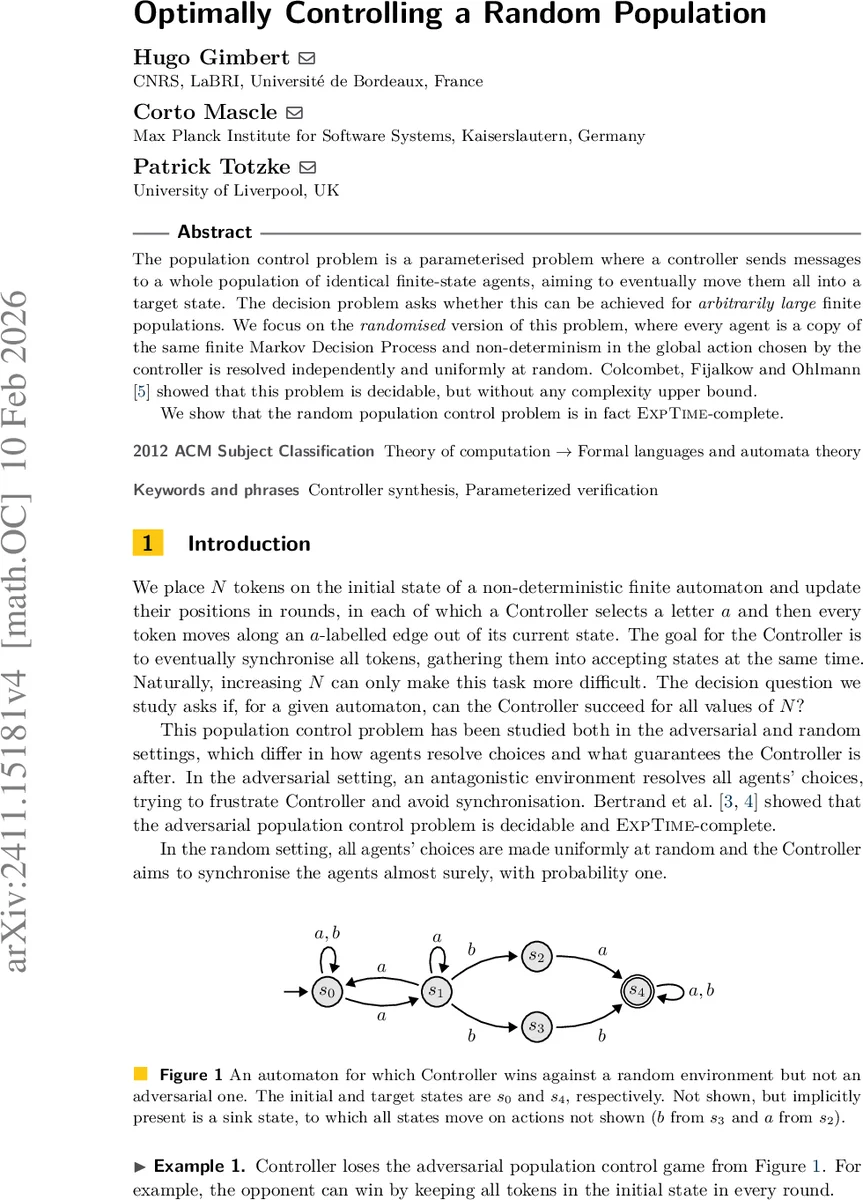
이 논문은 먼저 기존 연구가 제시한 무작위 인구 제어 문제의 결정 가능성 결과를 재검토한다. 여기서 각 에이전트는 동일한 MDP(마코프 결정 과정)를 공유하고, 컨트롤러가 선택한 전역 액션에 대해 에이전트들은 독립적으로 균등하게 전이한다. 목표는 모든 가능한 유한 인구 규모에 대해, 거의 확실히(확률 1) 모든 토큰을 목표 상태 집합 F 에 도달시키는 전략이 존재하는지를 판단하는 것이다.
핵심 기법은 ‘승리 아레나’를 심볼릭하게 표현하는 것이다. 상태 벡터 v ∈ ℕ^S 로 토큰 수를 요약하고, (v, a) 형태의 커밋 이데얼을 사용해 ‘아레나’를 유한 개의 이데얼 합집합으로 나타낸다. 이때 K‑정의 가능성(K‑definability)이라는 개념을 도입해, 각 좌표가 0…K 혹은 무한(ω) 값만을 가질 수 있는 제한된 형태의 이데얼만을 고려한다. 논문은 모든 승리 아레나가 이러한 K‑정의 가능한 형태로 근사될 수 있음을 보이며, 특히 K를 |S| 로 잡으면 충분히 표현 가능함을 증명한다(정리 6). 이는 무한히 큰 토큰 수를 다루면서도, 실제 알고리즘 구현에서는 유한한 심볼만을 조작하면 된다는 중요한 통찰을 제공한다.
다음으로 ‘동적 흐름 문제’를 정의한다. 주어진 심볼릭 커밋 집합 V와 초기 벡터 v₀, 목표 집합 F에 대해, V 안에서 모든 구성 γ ∈ v₀↓ 가 F↓ 로 이동 가능한 경로가 존재하는지를 판단한다. 이 문제는 토큰 이동을 흐름 네트워크로 모델링하고, 용량 제약을 고려한 ‘연속 흐름’ 검증과 동등함을 보인다. 논문은 이를 다항식 공간에서 로그 K 및 |S| 에 대한 다항식 시간으로 해결할 수 있음을 제시한다(정리 7).
알고리즘 1은 초기 후보 아레나를 |S|‑정의 가능한 최대 집합으로 시작하고, 두 가지 검증 절차를 반복한다. 첫 번째는 아레나가 전이 폐쇄성을 만족하는지(즉, 어떤 커밋이 존재하면 그에 대응하는 모든 전이가 아레나 안에 있는지) 확인하고, 위반 시 해당 커밋을 제거한다. 두 번째는 동적 흐름 검사를 통해 현재 아레나가 실제로 모든 구성에서 목표 F 로 도달 가능한지 확인한다. 이 과정을 고정점에 도달할 때까지 반복하면, 남은 집합은 승리 아레나이며, 초기 상태 i 에 해당하는 벡터가 포함되는지 여부가 문제의 정답이 된다.
복잡도 측면에서, 정리 6에 의해 필요한 K는 |S| 로 제한되므로 후보 집합의 크기는 지수적으로 증가하지 않는다. 정리 7에 의해 동적 흐름 검사는 다항식 공간에서 수행 가능하므로, 전체 알고리즘은 지수 시간(EXPTIME) 안에 종료한다. 또한, 기존에 알려진 EXPTIME‑hardness 결과(정리 17)를 이용해 문제의 하한도 EXPTIME임을 보이며, 따라서 무작위 인구 제어 문제는 EXPTIME‑complete임을 확정한다.
이 논문의 주요 기여는 (1) 승리 아레나를 다항식‑정의 가능한 형태로 제한함으로써 심볼릭 표현을 효율화한 점, (2) 동적 흐름 문제를 다항식 공간에서 해결하는 새로운 기법을 제시한 점, (3) 이를 종합해 무작위 인구 제어 문제의 정확한 복잡도 클래스를 규명한 점이다. 이러한 결과는 대규모 분산 시스템, 생물학적 집단 모델링, 화학 반응 네트워크 등에서 무작위 환경 하에 전체 집단을 목표 상태로 동기화시키는 제어 전략 설계에 이론적 기반을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기