정밀 실시간 힘 인식 비행 로봇 그리퍼 시스템
초록
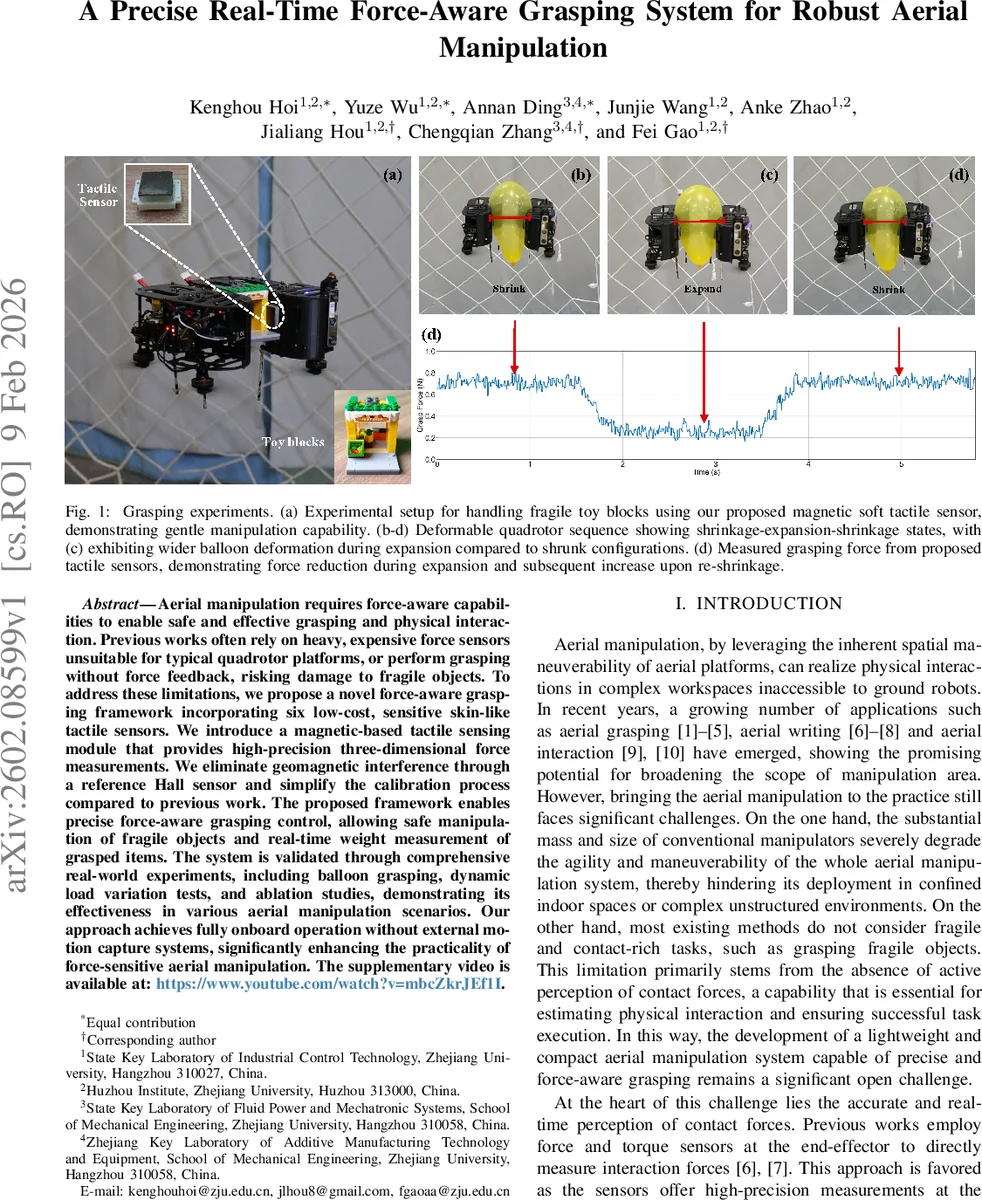
본 논문은 저비용 마그네틱 소프트 촉각 센서 6개를 비행 로봇에 통합하여, 지자기 간섭을 보정하고 실시간 3차원 힘을 측정한다. 이를 기반으로 적응형 어드미턴스 제어를 적용해 연약한 물체를 안전하게 잡고, 물체 무게를 실시간으로 추정한다. 전 과정이 온보드에서 이루어져 외부 모션 캡처 없이도 정밀한 힘‑인식 매니퓰레이션이 가능함을 실험을 통해 입증한다.
상세 분석
이 연구는 기존 항공 매니퓰레이션 시스템이 직면한 두 가지 핵심 문제—센서 무게·비용과 힘 피드백 부재—를 동시에 해결한다. 첫째, 저비용 마그네틱 촉각 센서는 기존의 무게가 무거운 힘·토크 센서(F/T 센서)와 달리 8 g의 초소형 무게와 10 mm의 최소 거리로 설계되어, 비행기의 비행 성능에 거의 영향을 주지 않는다. 센서는 실리콘 매트릭스에 네오디뮴-철-보론 입자를 혼합해 만든 유연한 마그네틱 필름을 이용하고, Hall‑effect 센서(MLX90393SL)로 변형에 따른 자기장 변화를 감지한다.
둘째, 비행 중 발생하는 지자기 간섭을 보정하기 위해 기체 본체에 별도의 기준 Hall 센서를 부착하고, 각 촉각 센서와 기준 센서 사이의 회전 행렬을 실시간으로 계산한다. 이를 통해 원시 자기장 데이터 B_i 를 B̂_i = B_i – S_i·B_ref 로 보정하고, 보정된 자기장값을 비선형 변환 함수 S(·)에 입력해 3차원 힘 f̂_i 를 얻는다. 보정 과정은 식 (4), (5)와 같이 간단한 행렬 연산으로 구현돼 실시간 처리에 적합하다.
제어 측면에서는 어드미턴스 제어 기반의 위치 제어와 힘 제어를 결합한다. 힘 피드백을 이용해 목표 접촉력 F_d 를 설정하고, 실제 측정값 f̂_i 와의 오차를 이용해 가상 질량·감쇠 파라미터를 조정함으로써 로봇의 궤적을 부드럽게 변형한다. 이 방식은 특히 풍선이나 부드러운 장난감처럼 변형 가능성이 큰 물체를 잡을 때, 물체가 과도하게 압축되는 것을 방지한다.
실험에서는 풍선 잡기, 동적 하중 변동 테스트, 그리고 센서 자체의 아블레이션 연구를 수행했다. 풍선 실험에서는 로봇이 수축‑팽창‑수축 사이클을 반복하면서 접촉력이 0.05 N 이하로 유지되는 것을 확인했으며, 하중 변동 실험에서는 무게가 10 g에서 200 g까지 변화해도 위치 오차가 2 cm 이하로 억제되었다. 또한, 센서 캘리브레이션이 기존 데이터‑드리븐 방식보다 5배 빠르게 수행될 수 있음을 보였다.
전체 시스템은 STM32F042 마이크로컨트롤러와 CAN·UART 복합 통신을 사용해 400 Hz 이상의 데이터 전송률을 달성한다. 이는 비행 제어 루프(≈200 Hz)와 충분히 겹쳐 실시간 힘‑인식 제어가 가능함을 의미한다. 비용 측면에서도 각 센서는 약 10 USD 수준이며, 전체 시스템 비용은 기존 F/T 센서 대비 80 % 이상 절감된다.
요약하면, 이 논문은 (1) 경량·저비용 마그네틱 촉각 센서 설계, (2) 지자기 보정 알고리즘, (3) 힘‑인식 어드미턴스 제어를 통합한 완전 온보드 항공 매니퓰레이션 프레임워크를 제시한다. 이는 향후 재난 구조, 고층 건물 점검, 정밀 농업 등에서 연약한 물체를 안전하게 다루어야 하는 응용 분야에 큰 파급 효과를 기대할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기