RFSoC 기반 NavIC 수동 레이더 통합 탐지 시스템
초록
**
본 논문은 AMD Zynq RFSoC에 NavIC L‑밴드 신호를 이용한 수동 레이더 수신기를 구현하고, 직접 신호(DS)와 지표 반사 신호(GRS)를 동시 처리해 지상·해상 목표물의 지연‑도플러 맵을 실시간으로 생성한다. 루프백 및 Keysight AWG를 이용한 신호 에뮬레이션으로 성능을 검증했으며, –12 dB SNR까지 4 km 거리 구분과 500 Hz 도플러 검출이 가능함을 보였다.
**
상세 분석
**
이 연구는 기존 GNSS‑반사계(Reflectometry) 시스템이 갖는 고전적인 문제점—다중 하드웨어 구성, 오프라인 처리, 높은 전력 소모—을 극복하기 위해 RFSoC라는 단일 칩 솔루션을 채택한 점이 가장 큰 혁신이다. RFSoC는 ARM A53 쿼드코어와 UltraScale FPGA, 그리고 고속 RF‑DC(ADC/DAC)를 하나의 패키지에 통합해 하드웨어‑소프트웨어 공동 설계(HW‑SW co‑design)를 가능하게 한다.
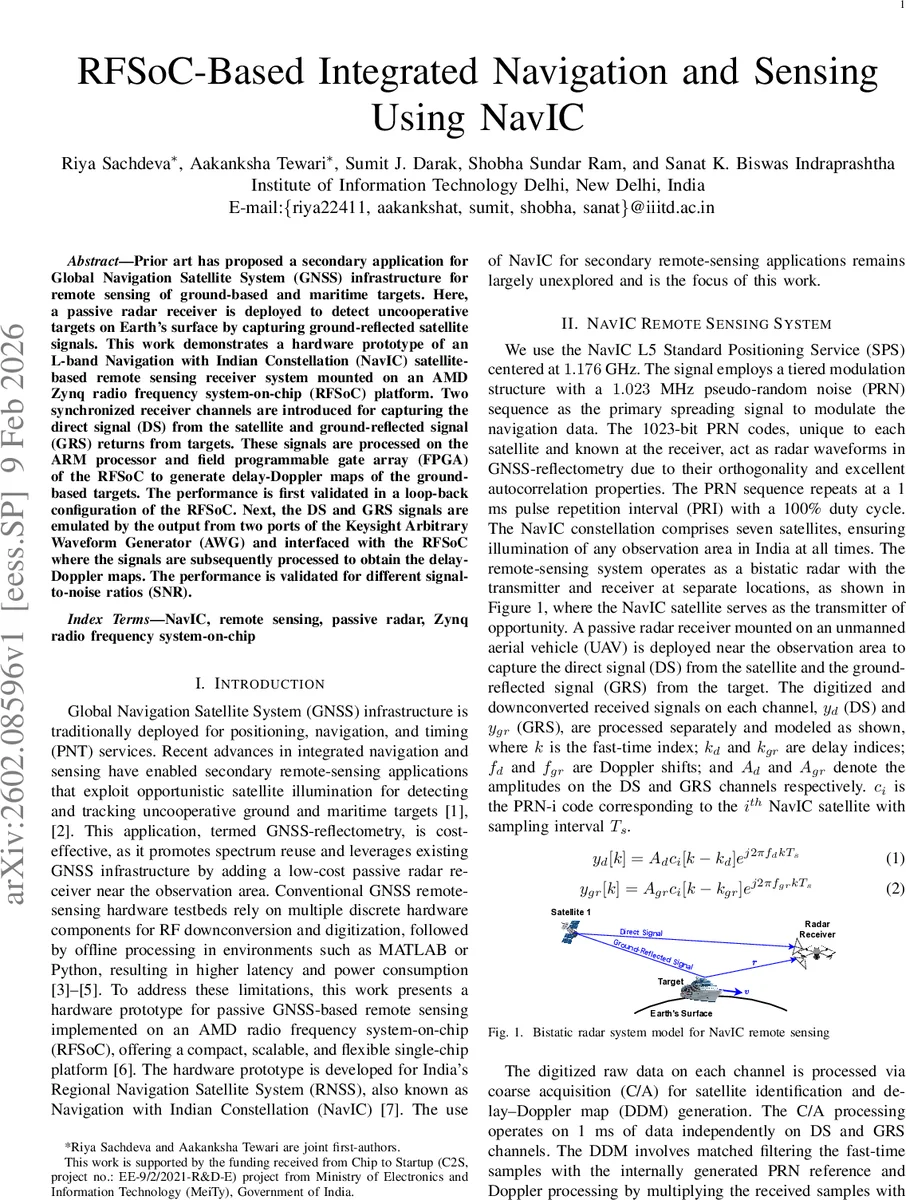
논문에서는 두 개의 동기화된 채널을 PL에 구현해 DS와 GRS를 각각 샘플링하고, 이를 PS(ARM)로 전송해 NavIC의 C/A(코스 어쿠지션) 처리와 매치 필터링을 수행한다. PRN‑2 코드를 1 ms 단위로 복원하고, 61.44 MHz로 업샘플링·디지털‑아날로그 변환 후 1.176 GHz(NavIC L5)로 변조하는 전송 경로와, 동일한 샘플링 레이트로 수신하는 루프백 구조를 상세히 설계하였다.
성능 검증은 두 단계로 진행된다. 첫 번째는 RFSoC 내부 루프백을 이용해 송·수신 경로를 완전 디지털화한 뒤, 인위적인 경로 손실·지연·도플러·AWGN을 삽입해 SNR을 –5 dB~–12 dB까지 변화시켰을 때 DDM(Delay‑Doppler Map)의 피크 검출률을 측정하였다. 두 번째는 Keysight M8910A AWG를 사용해 실제 RF 신호를 생성하고, RFSoC ADC에 직접 입력해 동일한 처리 흐름을 적용했다. 두 경우 모두 DS 채널에서 20 dB 이상의 피크 이득을 확보했으며, GRS 채널은 DS 대비 약 3 dB 낮은 이득을 보였지만 –12 dB SNR에서도 목표물(거리 4 km, 도플러 500 Hz) 검출이 가능했다.
표 I에 제시된 바와 같이, 평균 RMSE는 거리 0.14 km, 도플러 250 Hz 수준으로, NavIC의 2 MHz 대역폭이 제공하는 293 m 범위 해상도와 7.68 MHz 샘플링(40 m 정밀도)보다 충분히 근접한다. 또한 전체 수신‑처리 파이프라인의 실행 시간은 274 ms, 전력 소모는 3.75 W에 불과해 실시간 운용이 가능함을 입증한다.
비교 대상인 Nuand BladeRF 기반 GNSS 수신기와 소프트웨어 정의 인터페로메트리 수신기는 오프라인 처리에 머물러 실시간 응답성이 떨어지는 반면, 본 RFSoC 설계는 PL에 매치 필터와 FFT를 오프로드하면 3배 이상의 가속을 기대할 수 있다. 향후 작업으로는 실제 NavIC 신호를 수신하기 위한 아날로그 프론트엔드(AFE) 설계와, 다중 위성·다중 목표 추적을 위한 다채널 확장, 그리고 링크‑버짓 기반 감도 분석이 제시된다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기