오픈로드 자동 QoR 향상을 위한 코딩 에이전트 AuDoPEDA
초록
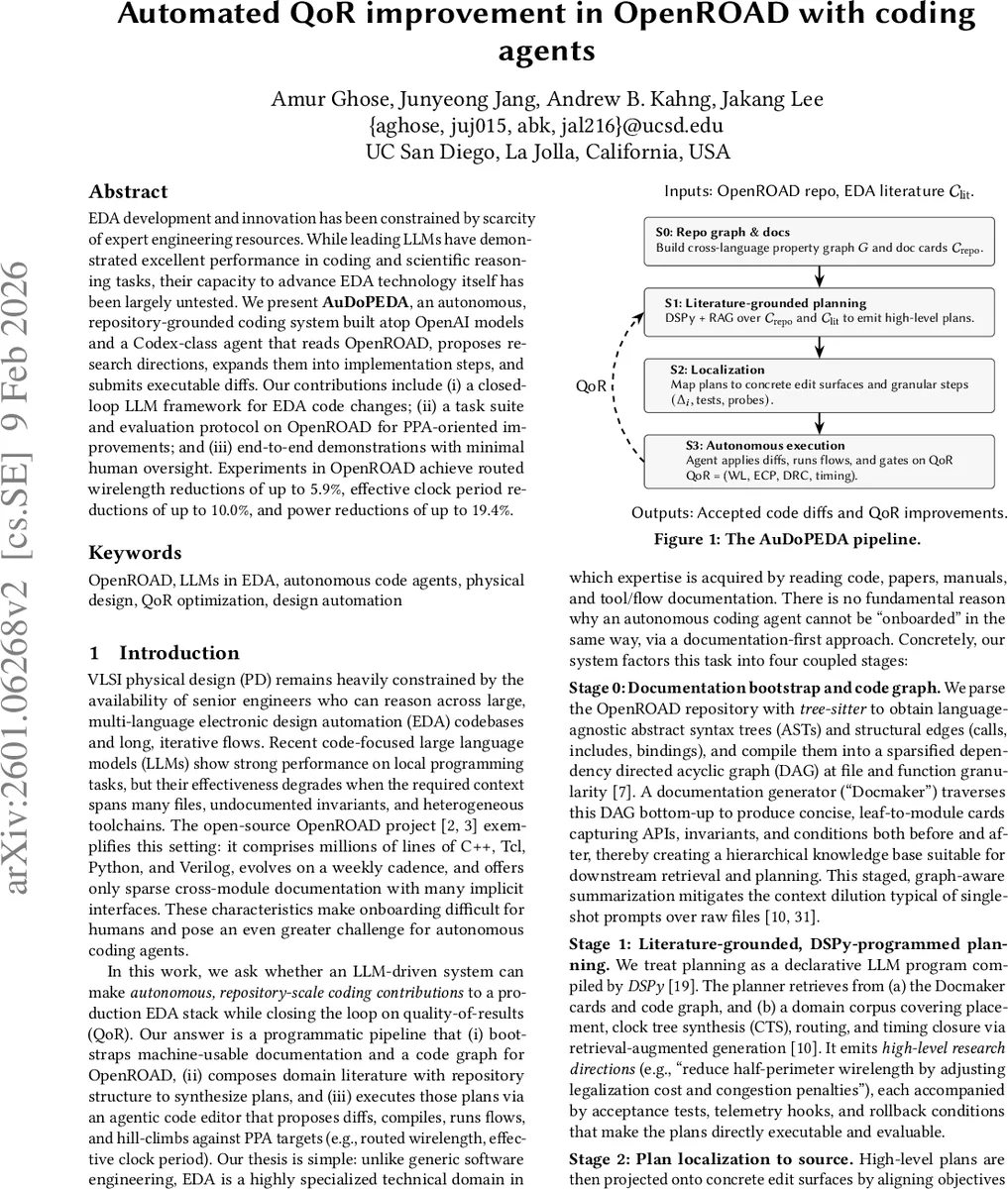
본 논문은 OpenROAD 물리 설계 스택에 LLM 기반 자동 코딩 에이전트를 적용해, 코드 문서화·계획·실행을 순환적으로 수행함으로써 라우팅 배선 길이, 클럭 주기, 전력 소비 등 주요 QoR 지표를 최대 19.4%까지 개선한 시스템 AuDoPEDA를 제안한다.
상세 분석
AuDoPEDA는 크게 네 단계(S0~S3)로 구성된 폐쇄형 피드백 루프를 구현한다. 첫 단계(S0)에서는 tree‑sitter 기반 파서를 이용해 C++, Tcl, Python, Verilog 등 다중 언어로 이루어진 OpenROAD 코드를 추상 구문 트리(AST)와 의존성 DAG로 변환하고, 이를 ‘코드 그래프 G’로 통합한다. 그래프의 노드는 파일·함수·클래스·호출 등으로 구분되고, 호출·포함·바인딩 등 타입화된 엣지를 통해 크로스‑언어 연결성을 확보한다. 이후 ‘Docmaker’가 G를 하향식으로 순회하면서 각 노드의 시그니처, 기본값, 전후조건, 설정 플래그 등을 추출하고, 코드‑특화 LLM을 활용해 요약 카드(역할, 입력·출력, 전후조건, 조정 가능한 파라미터) 형태로 자동 문서화한다. 이 과정은 문서 정확성을 검증하기 위해 그래프 내 존재 여부와 타입 일치를 체크함으로써, 인간 엔지니어가 수행하던 수작업 문서화 작업을 대체한다.
두 번째 단계(S1)에서는 DSPy라는 선언형 LLM 프로그래밍 프레임워크를 이용해 ‘문헌‑기반 계획 생성기’를 구현한다. 시스템은 S0에서 만든 카드와 별도 구축한 EDA 논문·튜토리얼·위키 코퍼스(C_lit)를 RAG(검색‑증강‑생성) 방식으로 결합한다. 목표 QoR(예: 배선 길이 감소)와 연관된 문헌을 검색한 뒤, LLM이 가설·알고리즘·조정 파라미터·테스트 케이스·텔레메트리 포인트를 포함한 고수준 연구 계획을 합성한다. 여기서 LM Assertions를 활용해 계획이 코드 그래프와 일치하는지, 파라미터 범위가 합리적인지 사전 검증한다. 이 단계는 단순 프롬프트 기반 코딩을 넘어, 도메인 지식과 레포지토리 구조를 동시에 고려한 ‘지능형 설계 탐색’를 가능하게 한다.
세 번째 단계(S2)에서는 고수준 계획을 구체적인 코드 편집 시퀀스로 로컬라이징한다. 그래프에서 목표 모듈·함수·스크립트를 식별하고, 해당 위치에 필요한 전·후 조건, 빌드·유닛 테스트, 런타임 프로브(와이어 길이, WNS, TNS, 전력 등)를 자동 삽입한다. 결과물은 순서가 명시된 ‘그라뉼 플랜’이며, 각 단계는 성공/실패 시 롤백 조건을 포함한다. 이는 인간이 수작업으로 작성하던 상세 설계 명세서를 LLM이 자동 생성하도록 만든다.
마지막 단계(S3)에서는 Codex‑class 에이전트가 실제 코드를 수정하고, 컴파일·빌드·OpenROAD 흐름을 실행한다. 에이전트는 실행 결과에서 측정된 QoR 지표를 실시간으로 피드백 받아, 목표치에 도달하지 못하면 ‘반례’를 생성해 S2 플랜에 재투입한다. 또한 회귀 방지를 위해 자동 bisect 및 revert‑on‑regression 메커니즘을 적용한다. 이러한 자기‑수정 루프는 SWE‑agent 및 Toolformer와 유사하지만, 물리 설계라는 고비용·고위험 도메인에 특화된 검증 기준(DRC, 타이밍, 전력)을 포함한다는 점에서 차별화된다.
실험 결과는 두 가지 주요 베이스라인(기본 OpenROAD 흐름 vs. AuDoPEDA 적용 흐름)에서 라우팅 배선 길이(WL) 최대 5.9% 감소, 유효 클럭 주기(ECP) 최대 10.0% 감소, 전력 소비 최대 19.4% 감소를 기록한다. 모든 패치는 OpenROAD 메인 레포에 PR 형태로 제출되었으며, 자동 테스트와 QoR 검증을 통과해 실제 코드베이스에 병합되었다. 이는 LLM이 단순 코드 생성 수준을 넘어, 실제 물리 설계 알고리즘을 개선하고 산업‑수준 툴 체인에 기여할 수 있음을 입증한다.
한계점으로는 (1) 현재는 OpenROAD 내부 C++·Tcl·Python 코드에만 초점을 맞추었으며, 외부 상용 툴(예: Synopsys, Cadence)과의 연동은 미지원, (2) 문헌‑기반 계획 단계가 여전히 인간 전문가가 정의한 ‘목표 QoR’와 ‘문헌 태깅’에 의존, (3) 대규모 베이스라인 실험이 제한된 벤치마크(예: ISPD, OpenCores)로 구성돼 일반화 가능성을 추가 검증이 필요하다. 향후 연구는 멀티‑툴 환경 지원, 자동 목표 설정(예: 비용‑성능 트레이드오프 최적화), 그리고 LLM 자체의 메타‑학습을 통한 계획 품질 향상을 목표로 할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기