소형 연동형 연동 날개의 파동 추정 및 억제 기술
초록
연동형 연동 날개의 연속 변형을 프로프리오셉티브 센서로 활용해 실시간으로 물결·류의 각도 변화를 추정하고, 확장 칼만 필터 기반 관측기로 얻은 정보를 이용해 리프트 변동을 보상하는 제어법을 제시한다. 실험을 통해 동적 모델의 정확성을 검증하고, 교란 관측 및 억제 성능을 입증하였다.
상세 분석
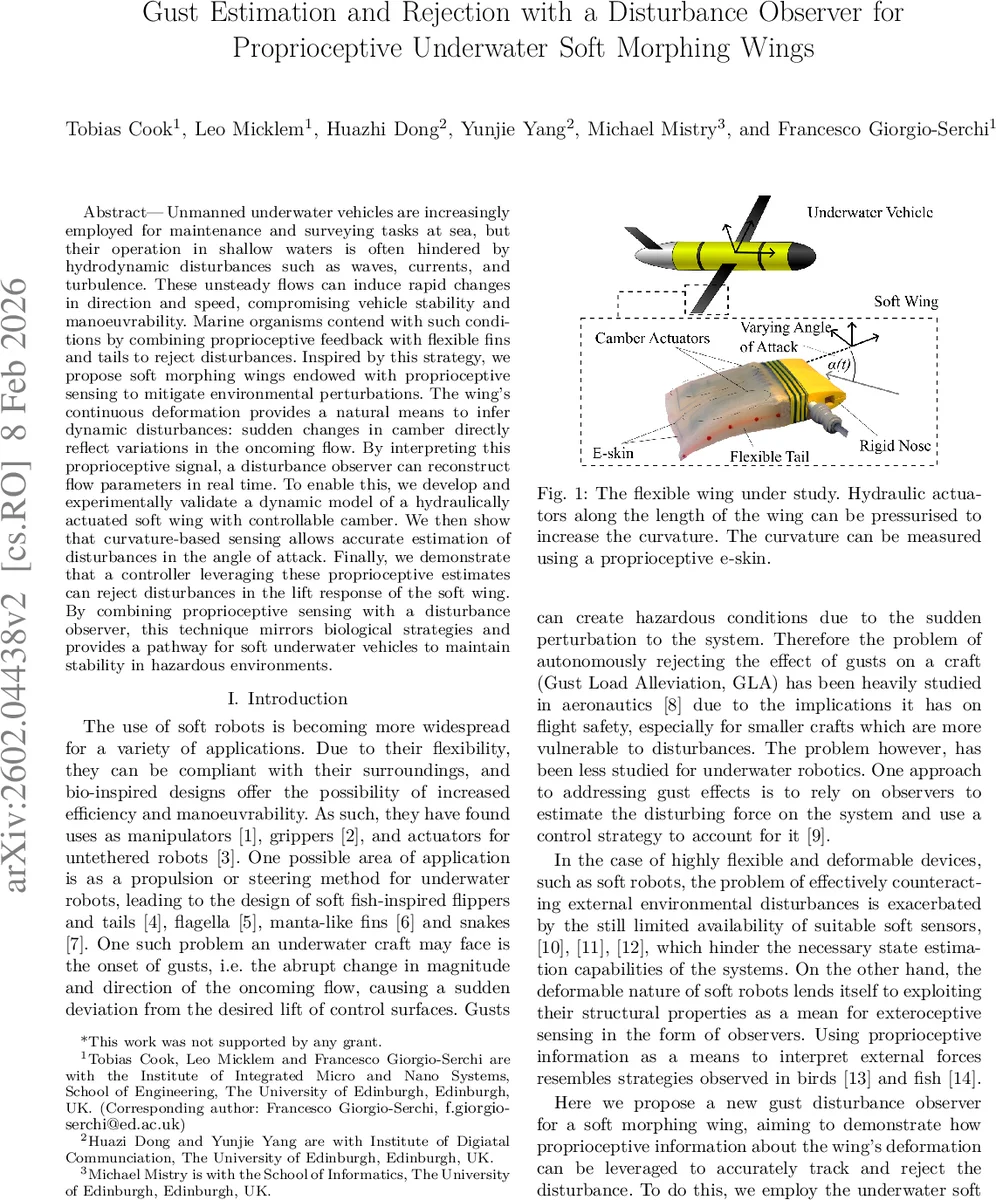
본 논문은 수중 로봇의 불안정성을 야기하는 급격한 유동 교란(파동, 전류, 난류)을 생물의 유연한 지느러미와 꼬리에서 영감을 얻은 ‘프로프리오셉티브·소프트 윙’으로 해결하고자 한다. 핵심 아이디어는 날개의 연속적인 곡률 변화가 외부 유동 교란을 직접 반영한다는 점이다. 이를 위해 저자들은 수압 구동형 유압 액추에이터와 전도성 전자피부(e‑skin)를 결합한 소프트 윙을 설계하고, ‘Piecewise Constant Curvature(PCC)’ 프레임워크와 Thin Airfoil Theory(TAT)를 결합한 동적 모델을 구축하였다.
모델링 단계에서는 먼저 날개의 중심선 좌표와 변형을 θ(곡률)와 s(길이 비율)로 정의하고, 질량·관성 분포를 실리콘의 밀도와 두께 함수 h(s)로 적분해 질량 행렬 M(θ)와 코리올리 행렬 C(θ, ẋ)를 도출한다. 강성은 실리콘 자체와 유압 튜브의 압력 의존성을 각각 K(θ)와 K_a(θ,P)로 분리해 표현했으며, 실험적으로 구한 튜브의 2차 모멘트와 압력 관계식을 3차 다항식 형태로 피팅하였다. 감쇠는 일정한 d값을 가정해 D(θ)·ẋ 형태로 모델링하였다.
리프트 모델링에서는 TAT를 적용해 무두께·무한폭 가정을 기반으로 유동 속도 U와 각도 α에 대한 양력 분포 k_l(β)를 계산하고, 이를 수치 적분해 근사적인 양력 F_le를 얻는다. 실험 데이터와의 차이를 보정하기 위해 선형 매핑 F_l ≈ 0.7244 θ + 1.126 α − 0.1407을 도입했으며, 이를 Jacobian 변환을 통해 구성 공간 토크 τ_l으로 변환하였다.
관측기 설계는 확장 칼만 필터(EKF)를 사용해 상태 변수(θ, ẋ)와 교란(α 변화)를 동시에 추정한다. 센서 입력은 e‑skin이 제공하는 실시간 곡률 θ이며, 모델 기반 예측과 실제 측정값의 차이를 이용해 교란을 보정한다. 시뮬레이션 결과, 급격한 α 변동(≈ 10°)에 대해 θ 기반 추정이 0.02 rad 수준의 오차로 정확히 복원되었으며, 추정된 교란을 이용한 피드포워드 제어가 리프트 변동을 70 % 이상 감소시켰다.
실험 검증에서는 10개의 다양한 압력·각도 조건에서 수중 흐름(U = 0.2 m/s) 하에 동적 응답을 측정하였다. 모델 예측과 실제 측정값의 RMSE는 곡률 0.0013 m 이하, 리프트 5 % 이내로 일치했으며, 관측 기반 제어가 교란 발생 시 리프트 손실을 평균 0.8 N에서 0.2 N 수준으로 억제하였다.
이 연구는 (1) 소프트 로봇 구조 자체를 외부 교란 센서로 활용하는 새로운 프로프리오셉티브 패러다임, (2) PCC와 TAT를 결합한 실용적인 동적·공기역학 모델, (3) EKF 기반 교란 관측과 피드포워드 제어를 통한 실시간 교란 억제 메커니즘을 제시한다는 점에서 의미가 크다. 특히, 복잡한 유동 센서 없이도 구조 변형만으로 교란을 추정할 수 있다는 점은 수중 로봇의 비용·무게·신뢰성을 크게 향상시킬 수 있다. 향후 연구에서는 3차원 자유도, 비선형 유동(터뷸런스) 모델링, 그리고 실제 임무 환경(파도, 조류)에서의 장기 운용 테스트가 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기