불확실한 환경에서의 적응형 로봇 검사 계획 프레임워크
초록
본 논문은 사전 3D 지도 기반의 전역 검사 경로와 실시간 표면 변화를 반영하는 지역 재계획을 결합한 계층적 검사 시스템을 제안한다. 프레셋 경로와 현장 관측 경로의 프레셋 거리 차이를 이용해 재계획 필요성을 판단하고, Kabsch 정렬과 비선형 MPC를 통해 안전하고 정확한 사진측량을 유지한다. 실제 광산에서 Spot 사족보행 로봇을 이용한 실험으로 접근법의 효율성과 적응성을 검증하였다.
상세 분석
이 연구는 두 단계의 계획 구조를 통해 환경 불확실성에 강인한 검사 로봇 시스템을 구현한다. 첫 번째 단계는 과거에 수집된 고정밀 3D 메쉬(M_H)를 이용해 관심 영역(R)을 격자화하고, 카메라 시야·중첩·거리 제약을 만족하는 뷰 포즈 집합 Z를 생성한다. 여기서는 격자 교차점 필터링, 표면 법선에 따른 투영, TSP 기반 순회 경로 최적화가 핵심이다. 두 번째 단계는 로봇이 현장에서 실시간으로 획득하는 포인트 클라우드(p_k)를 기반으로 로컬 뷰 플래너를 작동시킨다. 최근접 표면점(p_k^nn)을 찾아 뷰 벡터(ν_x, ν_y, ν_z)를 계산하고, 카메라 시야각(α,β)과 중첩 요구(γ_H,γ_V)를 적용해 다음 뷰 포즈를 도출한다.
핵심 적응 메커니즘은 전역 경로 Π_GV_P와 로컬 예측 경로 Π_LV_P 사이의 프레셋 거리(FD)를 정규화한 유사도 Γ_s를 이용한다. Γ_s가 사전 설정 임계값 Γ_t를 초과하면, Kabsch 알고리즘으로 두 경로를 강체 정렬하여 보정된 전역 경로 ˆΠ_GV_P를 생성하고, 이를 nMPC에 입력해 로봇을 실제 경로에 따라 추적한다. 이 과정은 매 플래닝 사이클마다 반복되어, 표면 변형, 돌발 장애물, 혹은 기존 경로와의 충돌 위험을 실시간으로 감지하고 보정한다.
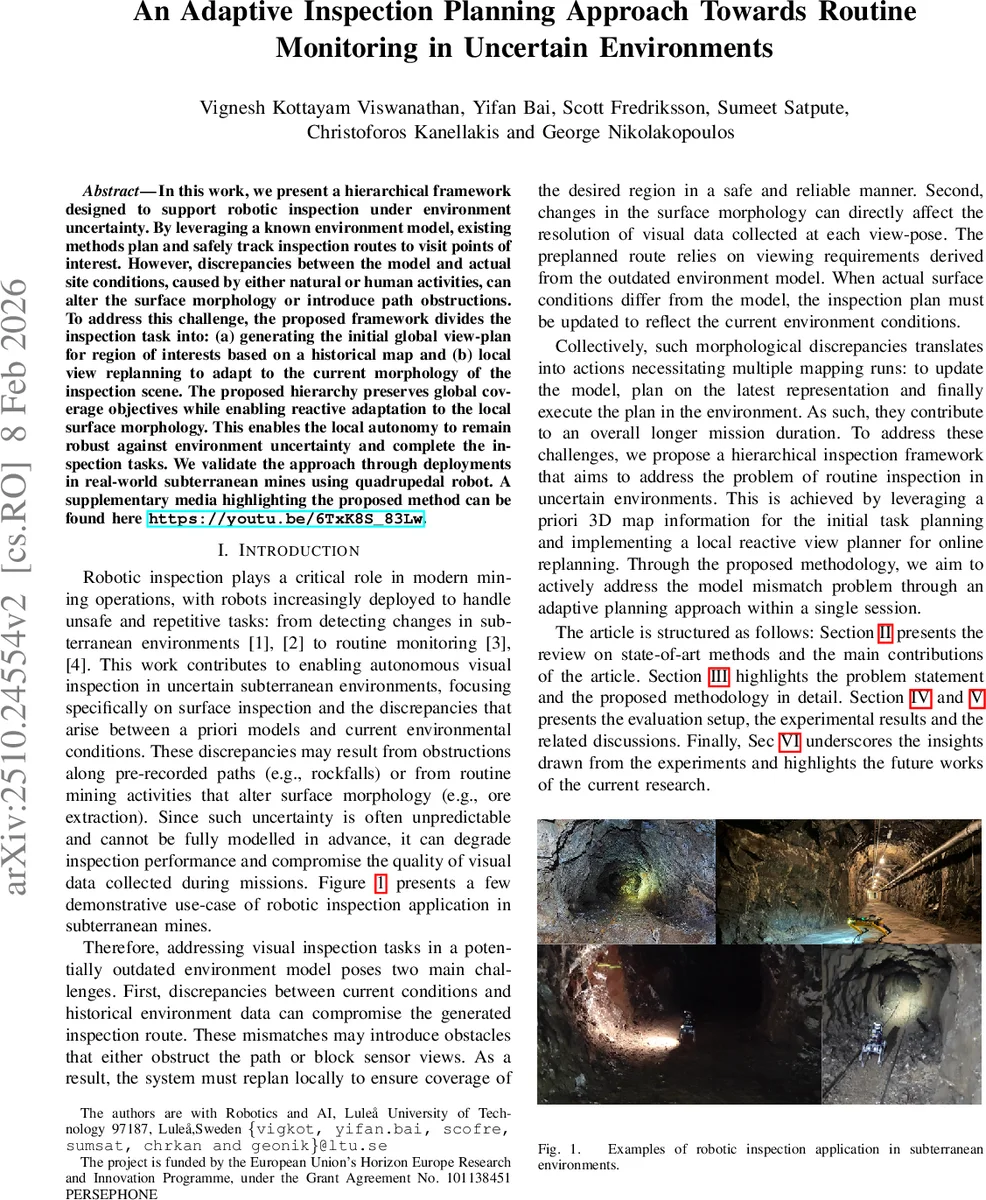
실험에서는 Spot 로봇에 Orbbec Gemini2XL 스테레오 카메라, Ouster LiDAR, VN‑100 IMU 등을 장착하고, ROS Noetic 기반의 온보드 컴퓨팅(NUC)에서 전체 파이프라인을 실행했다. 실제 광산의 복잡한 지형과 급변하는 암석면을 대상으로, 전역‑지역 협업 계획이 기존 단일 전역 플래너 대비 경로 길이 감소, 촬영 각도 개선, 미션 시간 단축을 달성함을 보여준다. 특히 프레셋 거리 기반의 불확실성 판단이 동적 장애물 회피와 표면 변형 보정에 효과적이며, Kabsch 정렬을 통한 경로 재정렬이 전역 목표 영역을 유지하면서도 로컬 최적화를 가능하게 한다는 점이 주목할 만하다.
이와 같이 본 논문은 사전 지도 활용과 실시간 재계획을 유기적으로 결합함으로써, 불확실하고 변화가 잦은 광산 환경에서도 로봇이 안전하고 효율적으로 시각 검사를 수행할 수 있음을 입증한다.
댓글 및 학술 토론
Loading comments...
의견 남기기