다중셀 변형 무인 지상 차량의 실시간 아핀 변환 제어
초록
본 논문은 전동·비전동 셀과 이동 로봇, 바·조인트로 구성된 다중셀 구조를 이용해, 셀 간 거리와 회전 각을 안전하게 유지하면서 원하는 아핀 변환(이동·회전·변형)을 실시간 추적하는 방법을 제안한다. 딥 뉴럴 네트워크 기반 셀 연결 설계, 변형 제한 이론, 그리고 전동·비전동 셀 각각에 대한 제어법을 하드웨어와 시뮬레이션으로 검증한다.
상세 분석
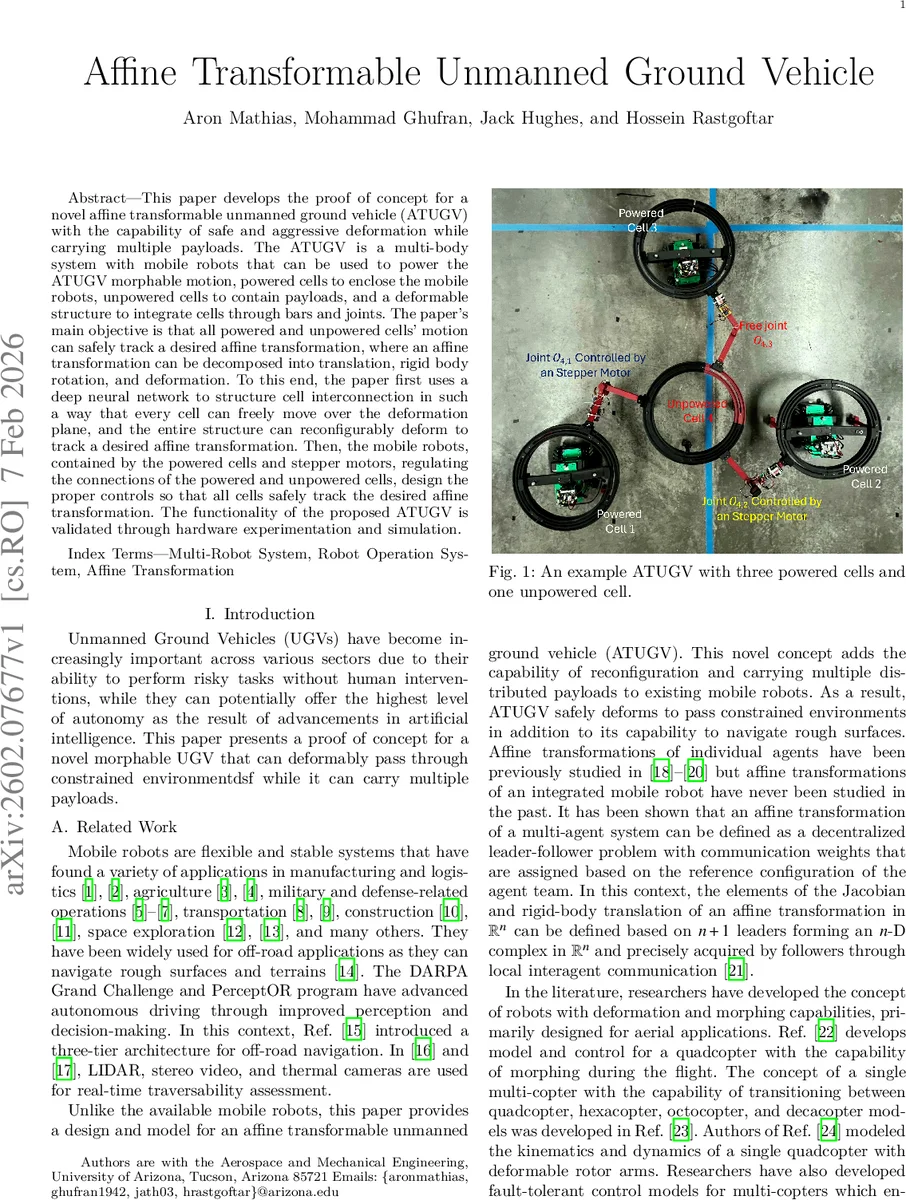
이 논문은 기존 무인 지상 차량(UGV)이 갖는 이동성에 변형성을 추가한 ‘Affine Transformable UGV(ATUGV)’ 개념을 제시한다. 핵심 아이디어는 셀(cell)이라는 기본 단위를 정의하고, 전동 셀(powered cell)은 내부에 모바일 로봇을 탑재해 자체 구동력을 제공하고, 비전동 셀(unpowered cell)은 페이로드를 실어 나르는 수동 구조물로 활용한다. 셀 간 연결은 그래프 G(V,E)로 모델링되며, 각 셀은 동일 반경 r을 갖는다. 저자들은 3‑계층 딥 뉴럴 네트워크를 이용해 셀 간 연결 구조를 자동 설계한다. 이 네트워크는 각 레이어가 특정 그룹(L)에 해당하는 셀 집합을 담당하도록 설계돼, 셀 간 상호작용을 최적화하고 변형 평면에서 자유로운 이동을 보장한다.
아핀 변환은 p_i = Q(t) a_i + d(t) 로 정의되며, Q는 회전·전단·축소를 포함하는 2×2 행렬이다. 저자는 Q를 R(σ_r)·U(σ_d,λ_1,λ_2) 로 분해해, 회전 각 σ_r, 전단 각 σ_d, 그리고 주축 변형률 λ_1, λ_2 로 제어 파라미터를 명시한다. 변형 안전성을 확보하기 위해 최소 셀 간 거리 d_min과 셀 반경 r을 이용해 λ_min = 2r/d_min 로 하한을 설정한다(정리 1). 이는 변형 과정에서 셀이 충돌하지 않도록 하는 수학적 근거를 제공한다.
제어 측면에서는 전동 셀은 위치 피드백 r_i(t)를 이용해 v_i = α_i (p_i - r_i) 로 속도 명령을 내리고, 비전동 셀은 두 개의 스테퍼 모터가 구동하는 엘보우 각 θ_ij를 목표 각 θ_dij(t) 로 조정한다. 목표 각은 현재 목표 위치 간 거리와 바 길이 L_ij, 셀 반경 r을 이용한 역기하학식(식 15a, 15b)으로 계산된다.
실험에서는 4셀(3전동+1비전동) ATUGV를 ROS 기반 모바일 로봇과 서보 조인트, 3D 프린팅 구조물로 구현하였다. Vicon 모션 캡처를 통해 실시간 위치를 측정하고, 제시된 변형 파라미터(λ_f1=0.9, λ_f2=0.8 등)를 적용해 20초(실험)와 10초(시뮬레이션) 동안 목표 아핀 변환을 성공적으로 추적했다. 결과는 변형 과정에서 셀 간 충돌이 없으며, 변형률과 회전·전단 각이 설계값에 근접함을 보여준다.
이 논문의 주요 기여는 (1) 딥 뉴럴 네트워크를 활용한 셀 연결 자동 설계, (2) 아핀 변환을 위한 변형 제한 이론 제시, (3) 전동·비전동 셀 각각에 맞춘 실시간 제어 전략, (4) 하드웨어와 시뮬레이션을 통한 전면 검증이다. 다만, 셀 수가 늘어나면 네트워크 학습 및 제어 복잡도가 급증할 가능성이 있으며, 3차원 변형 및 외부 장애물 회피에 대한 확장은 향후 연구 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기