로봇 한 몸에 두 인격: 분할 구현이 인간‑로봇 신뢰와 오류 귀속에 미치는 영향
초록
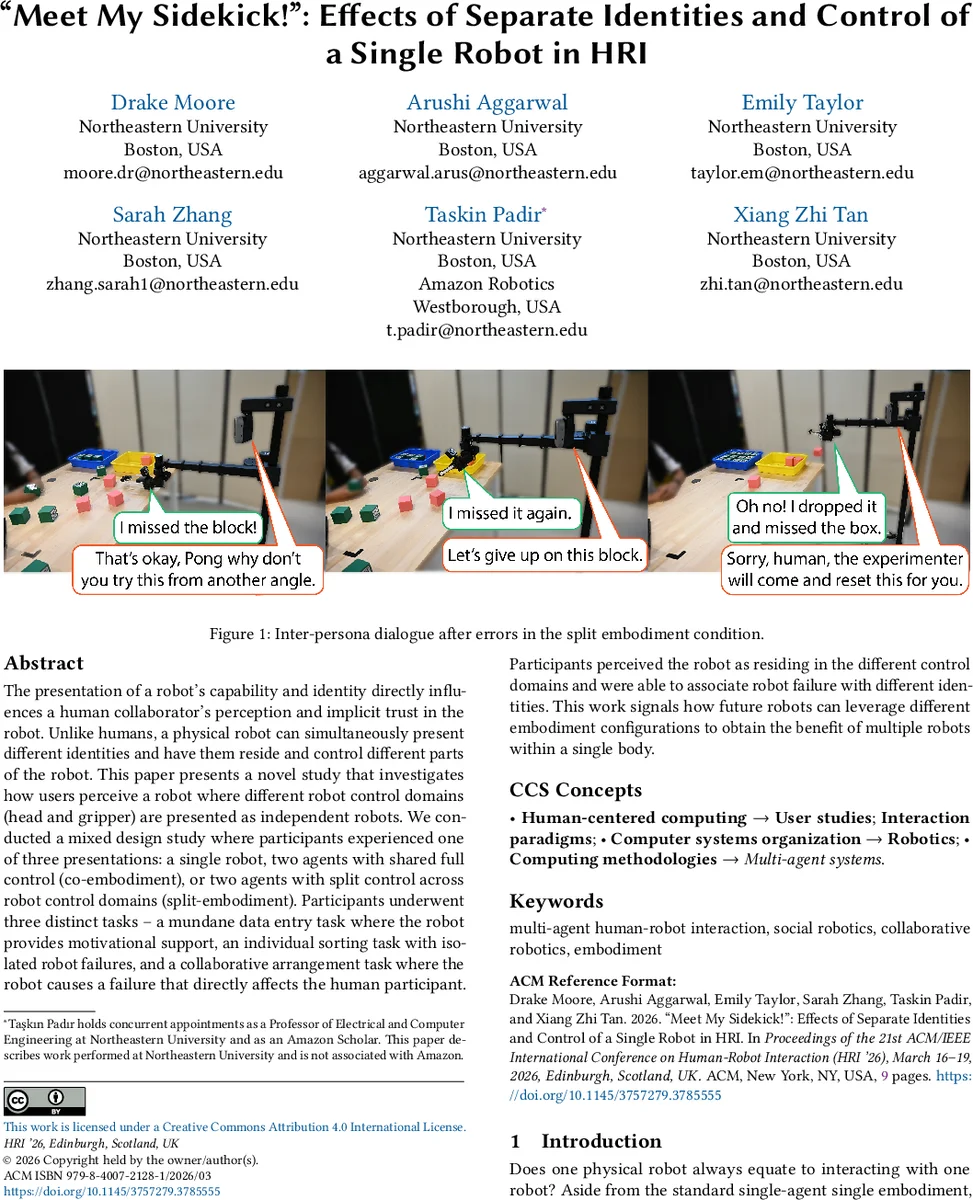
본 연구는 로봇의 머리와 그리퍼 등 물리적 서브시스템을 각각 독립된 인격으로 제시하는 “분할 구현(split‑embodiment)”을 도입하고, 단일 로봇, 공동 구현(co‑embodiment), 분할 구현 세 조건을 비교하였다. 동기 부여, 독립 정렬, 협업 배열의 세 과업에서 의도된 오류를 삽입해 참가자들의 신뢰, 능력 평가, 오류 귀속을 측정한 결과, 참가자들은 분할 구현에서도 각 서브시스템을 별도 로봇으로 인식하고, 실패가 발생한 서브시스템에만 비난을 집중한다는 것을 확인하였다.
상세 분석
이 논문은 인간‑로봇 상호작용(HRI) 분야에서 “다중 정체성(multi‑identity)”을 물리적 다중 로봇이 아닌 하나의 로봇 몸체에 구현하는 새로운 패러다임을 제시한다. 기존 연구는 주로 여러 로봇이 동시에 존재하거나, 동일 로봇이 상황에 따라 정체성을 전환하는 ‘재구현(re‑embodiment)’에 초점을 맞추었다. 여기서는 로봇의 제어 영역을 두 개의 서브시스템(머리·베이스와 팔·그리퍼)으로 나누고, 각각을 독립된 에이전트가 제어하도록 설계하였다. 이를 위해 저비용 USB 스피커와 음성 피치 차이를 이용해 두 인격을 구분했으며, ROS2 기반 분산 제어와 YOLO 기반 비전 서보를 활용해 실제 조작 오류를 재현했다.
실험 설계는 3×3 혼합형으로, ‘구현 형태(단일, 공동, 분할)’를 피험자 간 요인, ‘과업(동기 부여, 정렬, 배열)’을 피험자 내 요인으로 두었다. 특히 두 번째와 세 번째 과업에서는 로봇이 의도적으로 집기 실패와 물체 미배치를 일으켜 오류 귀속을 측정했다. 결과는 다음과 같다. 첫째, 분할 구현에서도 참가자들은 머리와 팔을 각각 다른 “사이드킥”으로 인식했으며, 이는 사전 설계된 음성·동작 단서가 충분히 구분성을 제공했기 때문이다. 둘째, 오류 발생 시 참가자들은 실패한 서브시스템을 담당한 인격에만 부정적 평가를 내렸고, 다른 인격에 대한 신뢰는 크게 감소하지 않았다. 이는 ‘신뢰 영역(loci of trust)’이 물리적 몸체와는 독립적으로 형성될 수 있음을 시사한다. 셋째, 공동 구현과 비교했을 때, 분할 구현은 동일한 신뢰·능력 평가를 유지하면서도 하드웨어 비용을 최소화한다는 실용적 장점을 보여준다.
이러한 발견은 로봇 설계자가 복수의 역할(예: 안내·조작, 감정·작업) 을 하나의 플랫폼에 통합하고 싶을 때, 물리적 로봇을 추가로 배치하지 않아도 사용자에게 “다중 로봇”과 유사한 사회적 효과를 제공할 수 있음을 의미한다. 또한 오류 귀속을 서브시스템 수준으로 제한함으로써 전체 시스템에 대한 부정적 인식을 방지하고, 장기적인 인간‑로봇 협업 관계를 강화할 수 있다. 향후 연구에서는 보다 복잡한 다중 서브시스템(예: 시각·청각·촉각 모듈) 및 정서적 정체성 차별화를 도입해, 신뢰 동역학과 작업 효율성에 미치는 영향을 정량화할 필요가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기