초고속 시뮬레이션 기반 자율비행 드론 통합 프레임워크
초록
본 논문은 ROS 2와 Docker 컨테이너를 활용해 PX4와 ArduPilot을 동시에 지원하는 오픈소스 스택을 제시한다. GPU 가속 객체 탐지와 LiDAR 기반 ICP를 포함한 인지 파이프라인을 시뮬레이션에 통합하고, 20배 이상의 Faster‑than‑real‑time 성능을 달성함으로써 개발‑테스트‑배포 주기를 크게 단축한다.
상세 분석
aerial‑autonomy‑stack은 현재 드론 연구와 산업 현장에서 가장 널리 쓰이는 두 개의 오픈소스 autopilot, 즉 PX4와 ArduPilot을 하나의 추상화 레이어 아래에 묶어 autopilot‑agnostic 인터페이스를 제공한다는 점에서 큰 의미가 있다. ROS 2 Humble을 핵심 미들웨어로 채택하고, Micro‑XRCE‑DDS와 MAVLink‑bridge를 통해 uORB와 ROS 2 토픽 간의 저지연 양방향 통신을 구현한다. 이는 기존에 ROS 1 기반의 mavros가 제공하던 기능을 넘어, 저전력 임베디드 보드와 고성능 Jetson 시리즈 모두에서 일관된 메시징을 보장한다.
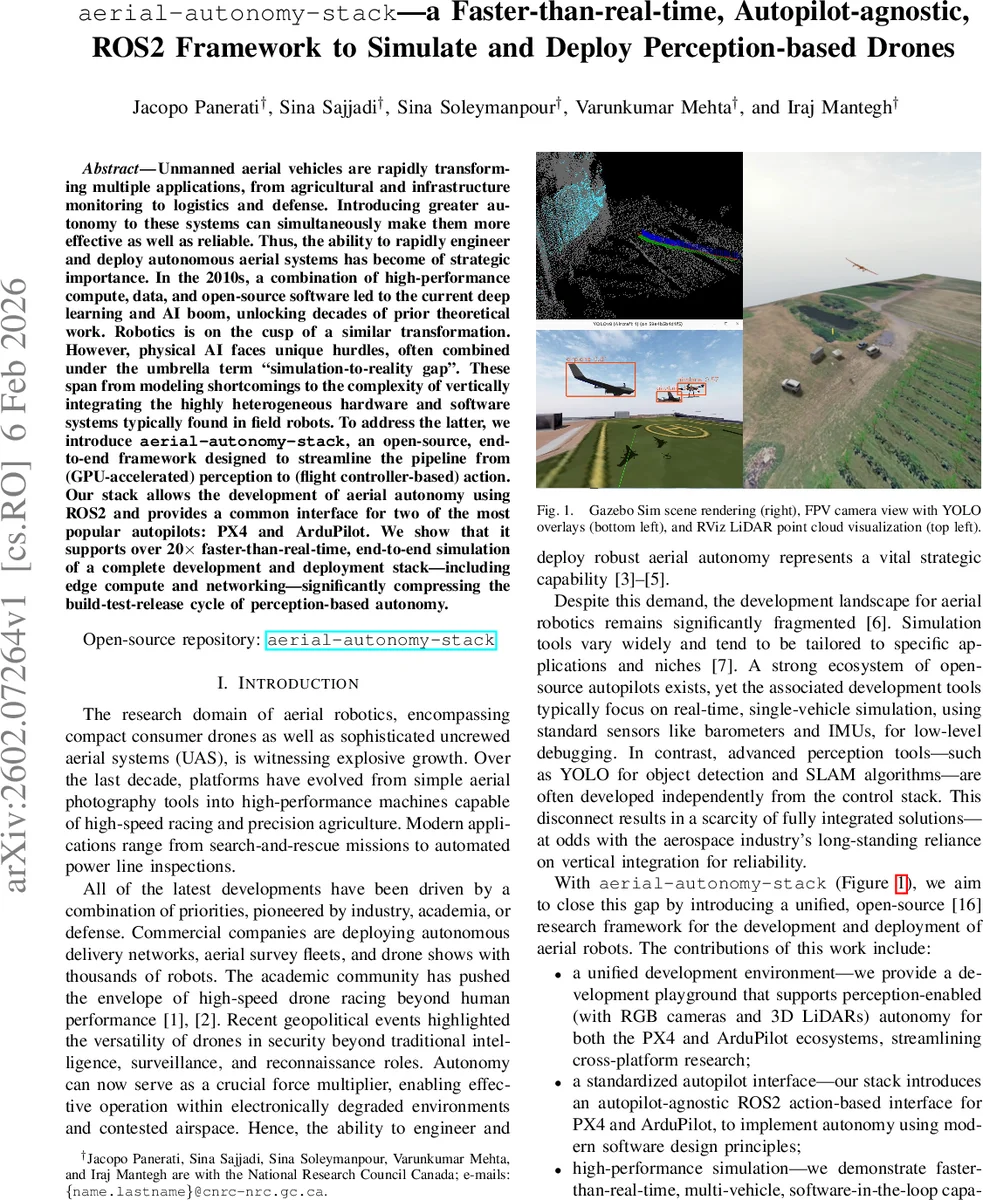
시뮬레이션 엔진으로 Gazebo Sim(Harmonic)을 선택한 이유는 ODE 물리와 Ogre2 기반 렌더링이 NVIDIA GPU 가속과 잘 맞물려, 헤드리스 모드에서 시뮬레이션 속도를 자유롭게 조절할 수 있기 때문이다. 특히 “fast‑than‑real‑time stepping” 기능을 활용해 시뮬레이션‑in‑the‑loop(SITL)과 하드웨어‑in‑the‑loop(HITL) 컨테이너를 동시에 구동함으로써, 실제 Jetson 모듈을 탑재한 에지 디바이스와 동일한 네트워크 토폴로지를 재현한다.
인지 파이프라인은 Ultralytics YOLOv8 nano 모델을 ONNX Runtime으로 변환해 GPU와 CPU 양쪽에서 동일한 바이너리를 실행한다. 이는 시뮬레이션 단계와 현장 배포 단계 사이의 모델 호환성을 보장하고, 추론 지연을 수십 밀리초 수준으로 낮춘다. LiDAR odometry는 KISS‑ICP를 채택해 포인트 클라우드 매칭 비용을 최소화하면서도 100 Hz 수준의 실시간성을 유지한다. 두 인지 모듈 모두 ROS 2 토픽으로 결과를 퍼블리시하므로, downstream 제어 로직은 perception‑agnostic하게 설계될 수 있다.
컨테이너화 전략은 세 가지 핵심 목표를 달성한다. 첫째, Docker‑compose 기반의 멀티‑컨테이너 네트워크를 이용해 시뮬레이션‑subnet, air‑subnet, ground‑subnet을 물리적으로 분리하면서도 필요 시 브릿지를 통해 데이터 복제를 수행한다. 둘째, 동일한 소스 코드를 시뮬레이션 이미지와 실제 에지 이미지에 동시에 빌드함으로써 “write‑once‑run‑anywhere”를 실현한다. 셋째, Zenoh를 활용해 불안정한 무선 링크에서도 ROS 2 네임스페이스 간 선택적 데이터 복제를 가능하게 하여, 멀티‑드론 협업 시 네트워크 파편화 문제를 완화한다.
성능 평가에서는 4대의 멀티‑콥터와 1대의 VTOL을 동시에 시뮬레이션하면서, 전체 파이프라인(센서 시뮬레이션 → YOLO inference → ICP odometry → offboard control)이 실제 비행 시간 대비 20배 이상 빠르게 진행됨을 확인했다. 이는 시뮬레이션‑to‑real‑time 비율을 크게 개선함으로써, 대규모 데이터 수집 및 강화학습 환경 구축에 필요한 시간과 비용을 현저히 낮춘다. 또한, Docker 기반 HITL 테스트를 통해 Jetson Orin에서 실행되는 실제 perception 코드가 시뮬레이션과 동일한 결과를 산출함을 검증했다.
전체적으로 이 스택은 “시뮬레이션‑to‑실제” 격차를 물리 모델링 오류뿐 아니라 시스템 통합 복잡성 측면에서도 완화한다는 점에서, 차세대 물리 AI 연구와 상용 드론 솔루션 개발에 중요한 기반이 될 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기