연속 표면 커버리지 추정을 위한 제약 매니폴드 탐색
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
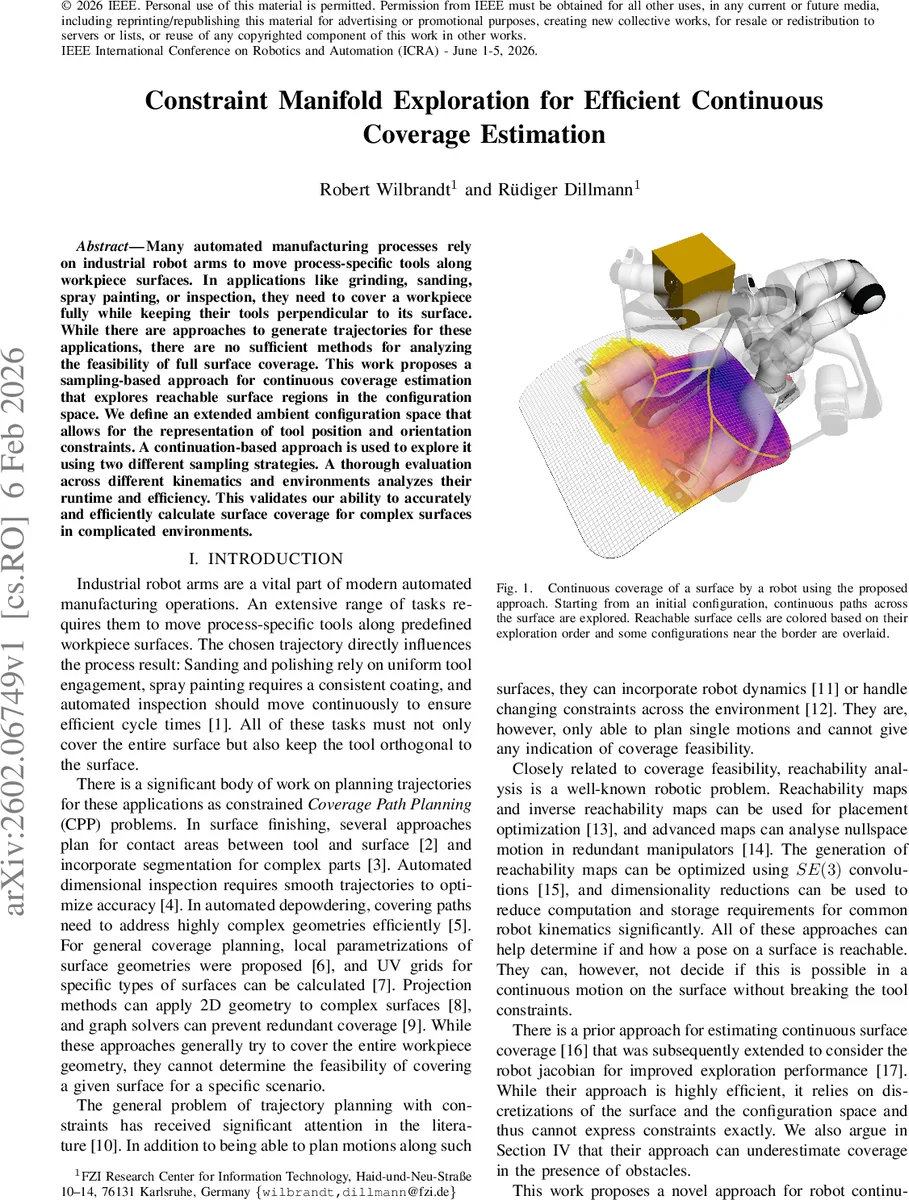
본 논문은 산업 로봇이 작업표면을 완전하게 커버하면서 툴을 표면에 수직으로 유지할 수 있는지 판단하기 위해, 툴 위치·방향 제약을 포함한 확장된 구성공간을 정의하고, 이 공간의 제약 매니폴드를 샘플링·탐색하는 두 가지 방법(RRT 기반 탐색 및 KPIECE 기반 편향 탐색)을 제안한다. 실험을 통해 다양한 로봇 기구학과 복잡한 환경에서 높은 정확도와 효율적인 커버리지 추정이 가능함을 입증한다.
상세 분석
이 연구는 기존의 궤적 생성 기법이 “전체 표면을 커버할 수 있는가”라는 질문에 답하지 못한다는 점에서 출발한다. 저자는 로봇의 자유도 n을 갖는 구성공간 Q와 표면 S(u,v)를 정의하고, 툴 위치 f_pos(q)와 툴 축 방향 f_rot(q)·
댓글 및 학술 토론
Loading comments...
의견 남기기