재구성 가능한 로봇 플랫폼 RAPID
초록
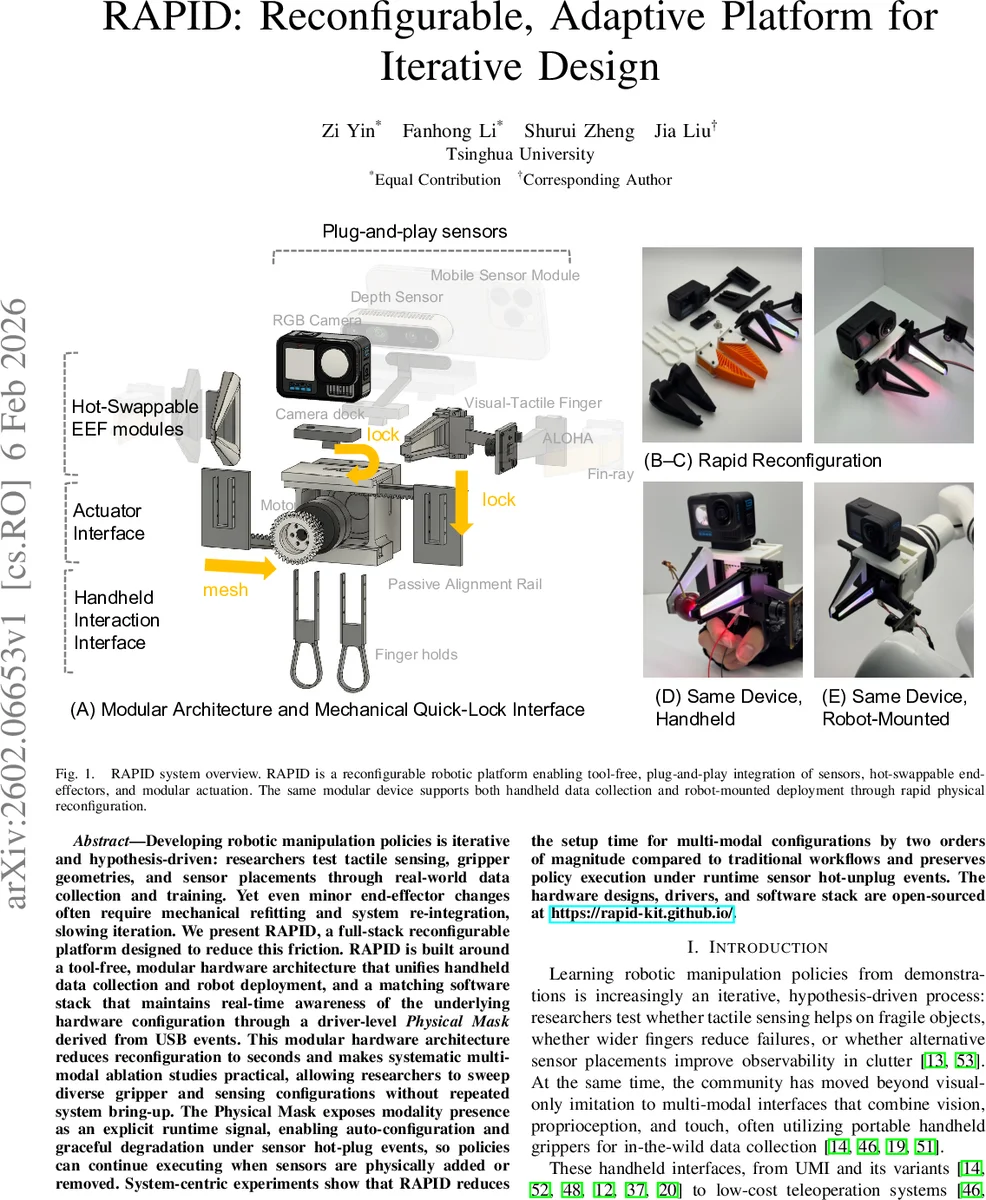
RAPID은 손쉽게 부품을 교체하고 센서를 핫플러그할 수 있는 모듈형 하드웨어와, USB 이벤트를 기반으로 현재 하드웨어 구성을 실시간으로 파악하는 ‘Physical Mask’ 소프트웨어 스택을 결합한 전·후단 통합 시스템이다. 이를 통해 손‑잡이와 로봇 장착 두 모드에서 동일한 장치를 사용하면서, 멀티모달 실험 설정을 수십 초 안에 전환하고, 센서가 제거·추가될 때도 정책 실행을 지속할 수 있다. 실험 결과 기존 워크플로 대비 설정 시간이 100배 이상 단축되었으며, 런타임 센서 핫‑언플러그 상황에서도 정책이 정상 작동한다.
상세 분석
RAPID의 핵심 혁신은 하드웨어와 소프트웨어가 동일한 ‘Physical Mask’라는 추상화를 통해 긴밀히 연동된 점이다. 먼저 기계적 설계는 mortise‑and‑tenon 형태의 슬롯과 툴‑프리 커넥터를 채택해, 손가락, 팁, 카메라 등 모듈을 2~3초 만에 교체하도록 설계되었다. 이 구조는 3D‑프린트 PLA 재질의 허용 오차를 고려한 것으로, 기존 스냅‑핏 방식보다 내구성이 높으며, 동일 베이스를 손‑잡이 모드와 로봇‑마운트 모드 사이에 손쉽게 전환할 수 있게 한다. 전기적 인터페이스는 전역 USB 허브를 중심으로 구성돼, USB‑2‑CAN, USB‑2‑Serial, USB‑2‑LAN 등 다양한 프로토콜을 하나의 OS 레벨 이벤트로 통합한다. 이렇게 하면 새로운 센서나 액추에이터를 추가할 때 별도의 드라이버 개발 없이 USB 시리얼 번호 혹은 포트 토폴로지를 기반으로 자동 인식한다.
소프트웨어 레이어에서는 udev 규칙과 데몬이 USB 플러그/언플러그 이벤트를 실시간으로 감지하고, 사전 정의된 모듈 레지스트리와 매핑한다. 매핑 결과는 ‘Physical Mask’라는 가상 디바이스 파일(/dev/hardware_mask_gen)로 500 Hz에 출력되며, 각 모달리티(예: wrist_camera, tactile_left, torque_sensor 등)의 존재 여부를 Boolean 값으로 제공한다. 이 마스크는 단순 타임아웃 기반 결측 감지와 달리 하드웨어 상태 변화를 즉시 반영하므로, 데이터 손실과 물리적 제거를 명확히 구분한다.
미들웨어는 ZeroMQ와 Zeroconf 기반의 경량 퍼블리시‑서브스크라이버를 사용해 센서 스트림과 마스크를 전파한다. 동기화 구독자는 설정된 25 ms 윈도우 내에서 모든 스트림을 정렬하고, 마스크가 ‘오프’인 채널은 제로‑필링(zero‑filling)하여 downstream 모듈이 항상 고정 차원의 입력을 받게 만든다. 이는 정책 학습 단계에서 modality dropout과 동일한 효과를 제공하면서, 런타임에는 실제 하드웨어 상태에 기반한 자동 구성(auto‑configuration)과 graceful degradation을 가능하게 한다.
시스템 평가에서는 N × M(그리퍼 × 센서) 조합을 전통적인 스크류‑베이스 워크플로와 비교했을 때, 설정 시간이 평균 5 s에서 500 s 수준으로 감소했으며, 센서가 실시간으로 언플러그돼도 정책이 중단 없이 계속 실행되는 것을 확인했다. 또한, 동일 베이스를 손‑잡이와 로봇‑마운트 모드 사이에 전환하는 과정이 10 s 이내에 완료돼, 데이터 수집 파이프라인을 현장과 실험실 사이에서 원활히 오가게 만든다.
RAPID은 오픈소스로 제공되며, 하드웨어 설계 파일, udev 규칙, 드라이버, 그리고 물리‑마스크 생성 로직을 모두 GitHub에 공개한다. 이는 연구자들이 자신만의 모듈을 추가하거나 기존 모듈을 재구성할 때 최소한의 엔지니어링 비용으로 시스템에 통합할 수 있게 한다. 전체적인 설계 철학은 “하드웨어 변경이 소프트웨어에 즉시 반영되는 환경”을 만드는 것으로, 로봇 매니퓰레이션 연구에서 반복 실험을 가속화하고, 멀티모달 어블레이션 연구를 실용적인 수준으로 끌어올린다.
댓글 및 학술 토론
Loading comments...
의견 남기기