전류선형성을 유지한 딥러닝 기반 자기장 모델링 및 실시간 역변환
초록
본 논문은 전류와 선형 관계를 보존하면서 다층 퍼셉트론(MLP)으로 자기장을 모델링하는 새로운 프레임워크를 제안한다. 제안된 ActuationNet과 PotentialNet은 고밀도 OctoMag·Navion 데이터셋을 이용해 학습되며, 1 ms 수준의 추론 속도로 최소노름 역변환을 실시간으로 수행한다. 실험 결과는 기존 Multipole Expansion Model(MPEM)과 동등한 예측 정확도와 유사한 데이터 효율성을 보여주며, 설계 선택만으로 MPEM에서 자주 보고된 작업공간 병렬조건 악화를 해소한다. 코드와 데이터는 모두 오픈소스로 제공된다.
상세 분석
이 연구는 전자기 내비게이션 시스템(eMNS)에서 필수적인 고정밀 자기장 모델링 문제를 데이터‑드리븐 접근법으로 재구성한다. 핵심 아이디어는 전류‑선형성을 유지하는 것이며, 이는 전자기 코일이 포화되지 않은 선형 구간에서 자기장이 전류에 비례한다는 물리적 사실에 기반한다. 이를 위해 저자들은 두 가지 MLP 기반 아키텍처를 설계하였다. 첫 번째인 ActuationNet은 위치 p를 입력으로 받아 현장‑별 행렬 A_b(p)와 편향 b₀(p)를 직접 예측한다. 이 구조는 선형‑아핀 형태 b = A_b(p)i + b₀(p) 를 그대로 보존하므로, Moore‑Penrose 의사역을 이용한 최소노름 역변환이 폐쇄형으로 가능해진다. 두 번째인 PotentialNet은 위치 p에 대한 스칼라 퍼텐셜 ϕ(p)와 편향 ϕ₀(p) 를 예측하고, 이를 기울기 연산(∇)으로 변환해 curl‑free 필드를 생성한다. 이 방식은 Maxwell 방정식 중 curl‑free 조건을 자동으로 만족시키지만, divergence‑free 조건은 별도 제약이 필요하다.
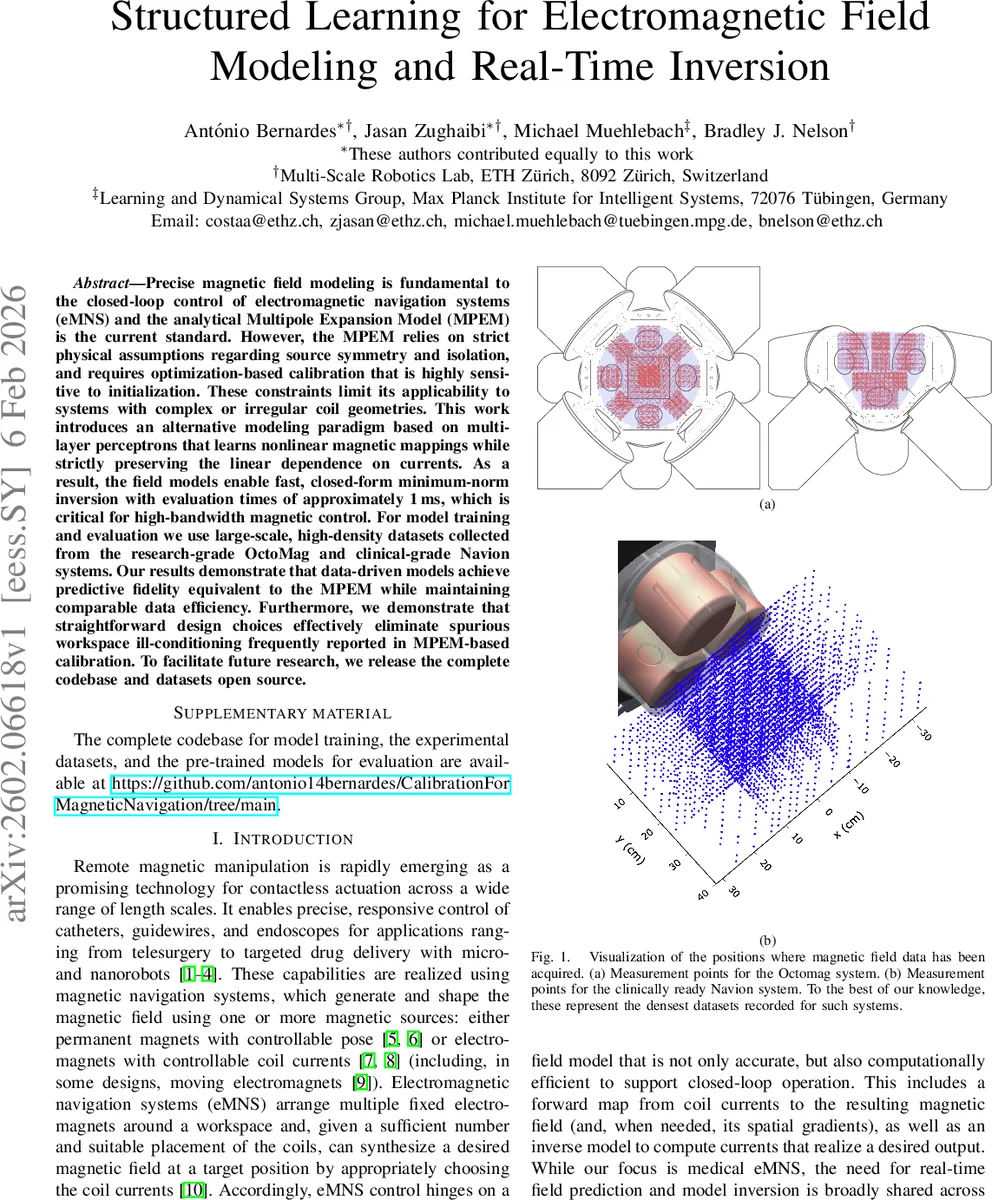
데이터 측면에서 저자들은 OctoMag(8코일, 13 cm 반구형 작업공간)와 Navion(3코일, 인간 규모 작업공간) 두 시스템에 대해 각각 1.7 mm·5 mm 간격의 고밀도 측정망을 구축하였다. 전류 범위는 ±4 A와 0–30 A로 설정했으며, 각 코일을 개별적으로 스윕해 선형성을 검증하였다. R² 값이 0.99 이상으로 일관되게 나타났으며, 일정한 편향 b₀는 센서 보정 오류나 잔류 자화에 기인한다는 점을 확인했다. 이상치 제거는 RANSAC 기반의 스케일‑인식 상대 잔차 r = ‖b‑b̂‖ / max(‖b‖, b_T) 를 활용해 20 % 초과 시 제외했으며, 전체 데이터의 2–3 %만을 제거하였다.
모델 학습에서는 tanh 활성화와 35개의 은닉층(각 128256 유닛)을 사용했으며, Adam 옵티마이저로 10⁵ 스텝까지 학습했다. MPEM은 기존 방식대로 레벤버그‑마르쿠아르트 최적화를 통해 다중극계 계수와 코일 자세를 추정했으며, 비교를 위해 표준 MLP와 Gradient‑Boosted 트리 모델도 베이스라인으로 포함하였다. 평가 지표는 평균 절대 오차(MAE), 상대 오차(RMSE), 그리고 역변환 시 조건수(cond)였다. 결과적으로 ActuationNet과 PotentialNet은 MAE ≈ 0.2 mT 수준으로 MPEM과 동등하거나 약간 우수했으며, 추론 시간은 CPU 기준 0.9 ms, GPU 기준 0.3 ms로 실시간 제어에 충분했다. 특히 MPEM에서 관찰된 작업공간 내 조건수 급증(ill‑conditioning) 현상이 ActuationNet에서는 거의 나타나지 않았으며, 이는 위치‑별 행렬을 직접 학습함으로써 물리적 제약을 과도하게 강제하지 않은 것이 원인으로 분석된다.
또한 데이터 효율성 실험에서는 전체 데이터의 10 %만 사용해도 MAE가 0.3 mT 이하로 유지되는 등, 고밀도 데이터가 없어도 충분히 일반화 가능함을 보여준다. 마지막으로 저자들은 전체 코드베이스와 전처리 파이프라인, 학습된 모델을 GitHub에 공개함으로써 재현 가능성을 높이고, 향후 다양한 전자기 로봇 시스템에 적용할 수 있는 기반을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기