다수에 묻힌 꼬리: 로봇 조작을 위한 장기 꼬리 모방 학습
초록
본 논문은 로봇 조작 데이터가 머리(task‑rich)와 꼬리(task‑scarce)로 극도로 불균형한 상황에서, 기존 재샘플링 기법이 효과가 없음을 실증하고, 꼬리 작업의 공간 추론 능력 저하가 주요 원인임을 규명한다. 이를 해결하기 위해 머리 작업의 접근 단계 데이터를 활용해 꼬리 작업의 접근 단계 데이터를 인위적으로 증강하는 Approaching‑Phase Augmentation(APA) 방식을 제안한다. 시뮬레이션 및 실제 로봇 실험에서 APA가 꼬리 작업 성공률을 크게 향상시킴을 보여준다.
상세 분석
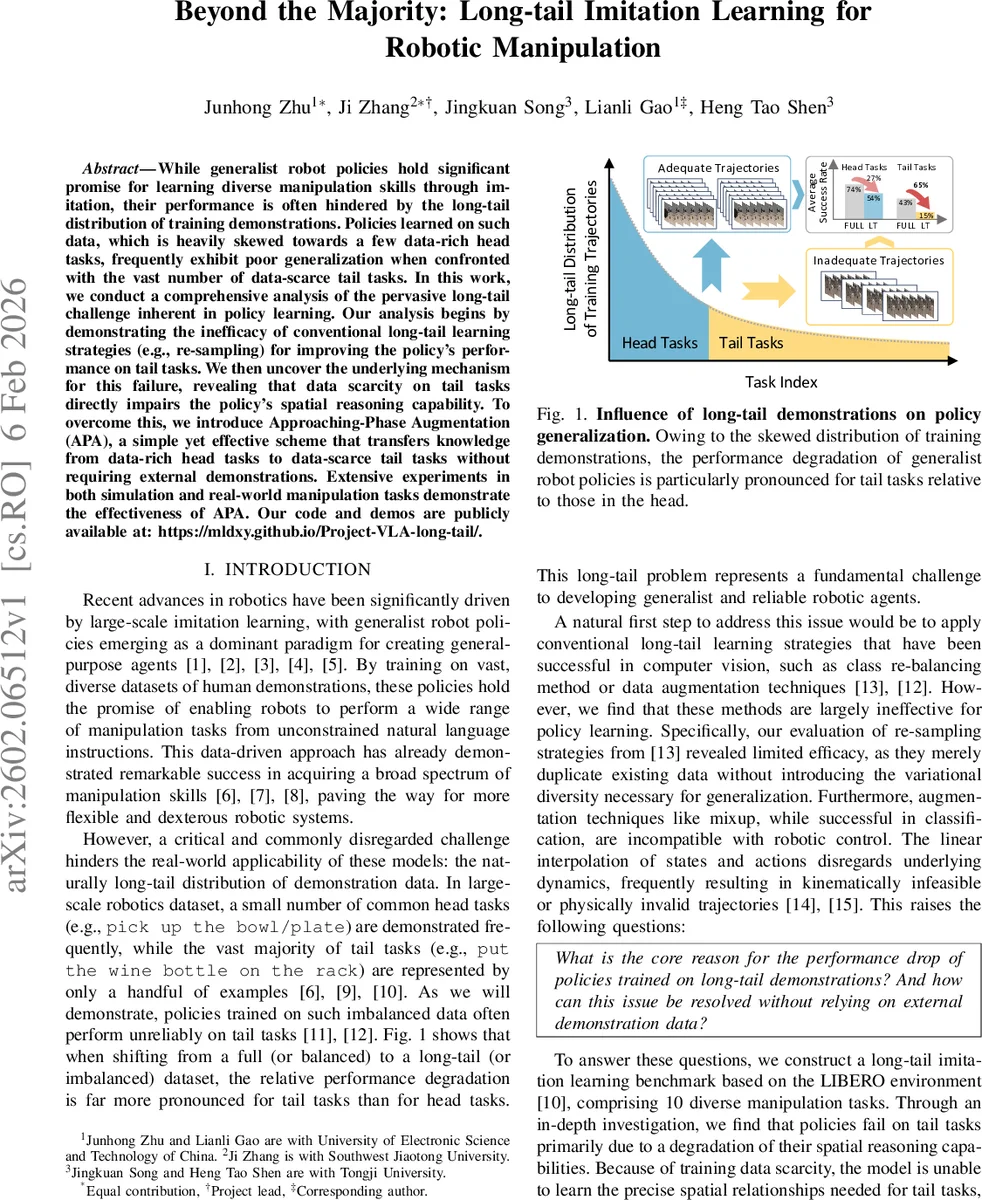
이 연구는 대규모 로봇 조작 데이터셋이 자연스럽게 장기 꼬리(long‑tail) 분포를 보인다는 점에 주목한다. 저자들은 LIBERO 환경을 기반으로 10개의 대표 작업을 선정하고, Pareto 분포를 적용해 데이터가 풍부한 머리 30%와 데이터가 희소한 꼬리 70%로 구분된 LIBERO‑Core‑LT 벤치마크를 구축하였다. 기존 이미지·비전 분야에서 효과적인 재샘플링(오버샘플링·언더샘플링) 및 mixup 등 데이터 증강 기법을 그대로 적용했을 때, 정책의 성공률이 거의 개선되지 않음을 실험적으로 확인하였다. 이는 단순히 데이터 양을 늘리는 것이 로봇 제어에서 요구되는 연속적인 동역학과 공간 관계를 학습하는 데 충분하지 않기 때문이다.
다음으로 저자들은 각 작업을 “접근 단계”(target approaching)와 “실행 단계”(subsequent execution)로 분리해 실패 원인을 정량화하였다. 상대 위험도(Relative Risk) 분석 결과, 꼬리 작업은 접근 단계에서 4배 이상 실패 위험이 증가했으며, 이는 공간 추론 능력—특히 물체와 엔드‑이펙터 사이의 정확한 위치·방향 관계를 파악하는 능력—이 데이터 부족으로 크게 저하된다는 것을 의미한다.
이러한 통찰을 바탕으로 제안된 Approaching‑Phase Augmentation(APA)은 머리 작업의 풍부한 접근 단계 데이터를 활용한다. 구체적으로, 머리 작업에서 추출한 물체와 로봇 사이의 상대 위치·자세 정보를 그대로 유지하면서, 꼬리 작업의 목표 물체에 매핑한다. 이렇게 생성된 합성 접근 단계는 물리적으로 타당하고, 기존 정책 학습 파이프라인에 그대로 투입될 수 있다. 중요한 점은 외부 추가 데모가 전혀 필요 없으며, 기존 데이터만으로 지식 전이를 수행한다는 것이다.
실험에서는 miniVLA 기반 정책을 사용해 시뮬레이션 10개 작업과 실제 로봇 6개 작업에 APA를 적용하였다. 결과는 꼬리 작업의 평균 성공률이 기존 방법 대비 15~30%p 상승했으며, 특히 접근 단계 실패율이 크게 감소함을 보여준다. 또한, APA는 학습 시간·메모리 오버헤드가 거의 없고, 실제 로봇 환경에서도 안정적으로 동작한다는 점에서 실용성이 높다.
이 논문의 주요 기여는 (1) 장기 꼬리 데이터가 로봇 정책의 공간 추론을 약화시킨다는 근본 원인을 실증적으로 규명한 점, (2) 머리 작업의 접근 단계 정보를 재활용해 꼬리 작업을 효과적으로 보강하는 APA 방법을 제안한 점, (3) 시뮬레이션·실제 로봇 양쪽에서 광범위한 실험을 통해 제안 방법의 일반성을 입증한 점이다. 향후 연구에서는 APA를 다른 유형의 정책(예: 강화학습 기반)이나 더 복잡한 다단계 작업에 확장하고, 자동화된 매핑 알고리즘을 도입해 인간 설계 개입을 최소화하는 방향이 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기