시각으로 배우는 인간형 로봇 보행
초록
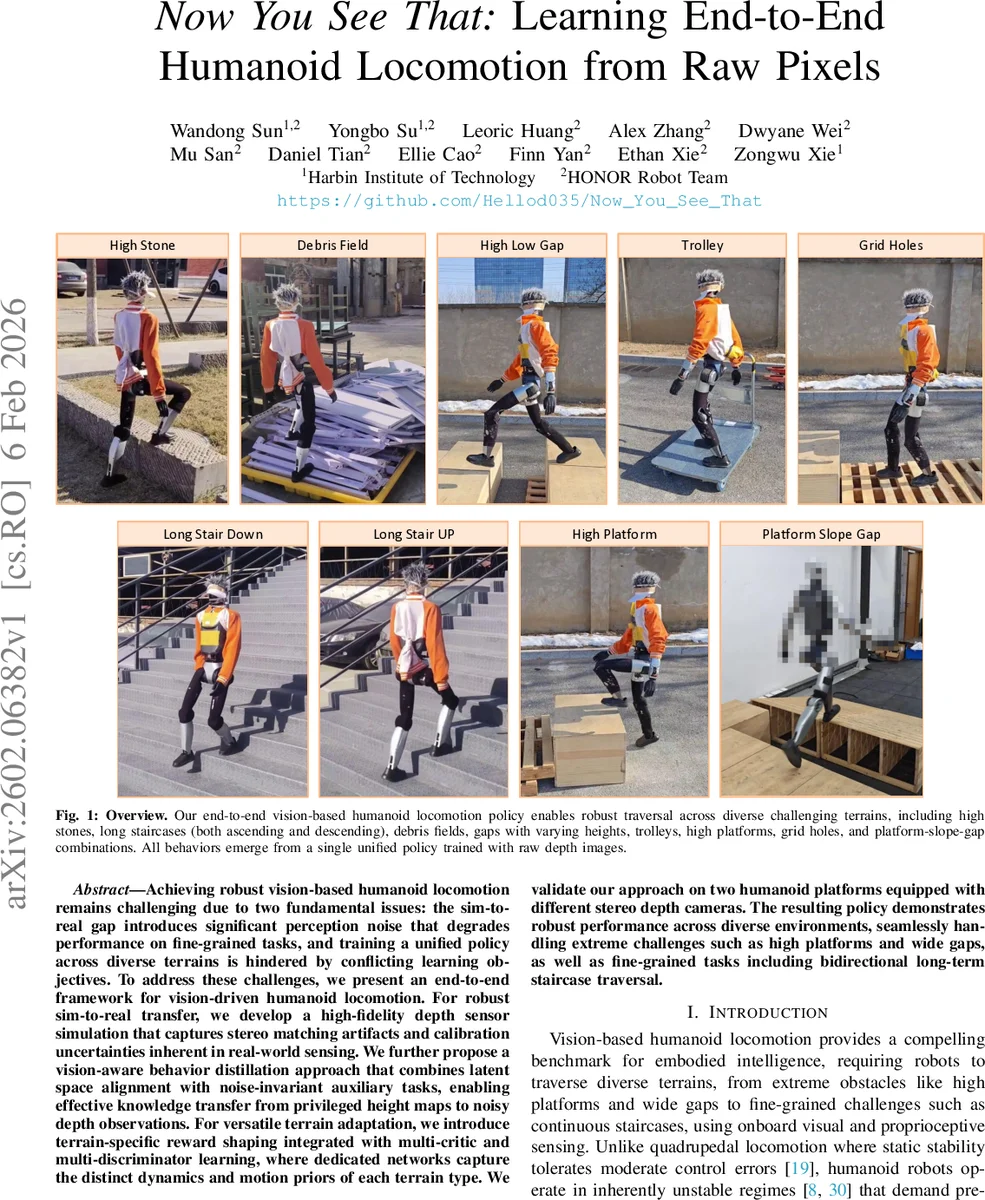
본 논문은 스테레오 깊이 카메라의 실제 센서 특성을 고도로 모사한 시뮬레이션과, 특수화된 보상 설계가 결합된 다중 비평가·판별기 구조를 통해, 원시 깊이 영상만으로 다양한 지형을 안정적으로 주행하는 인간형 로봇 정책을 학습한다. 시뮬‑실 전이 성능을 높이기 위해 고급 노이즈 증강 파이프라인과, 고도 지도(특권 관측)에서 얻은 행동을 깊이 영상에 정합시키는 비전‑인식 행동 증류 방식을 제안한다. 실험은 두 종류의 스테레오 카메라가 장착된 인간형 로봇에서 수행되었으며, 고플랫폼·와이드 갭 같은 극한 장애물부터 연속 계단 오르내리기 같은 정밀 동작까지 하나의 통합 정책으로 성공적으로 수행한다.
상세 분석
이 연구는 인간형 로봇 보행의 두 핵심 난제—시뮬‑실 간 감지 노이즈와 다중 지형에 대한 통합 제어—를 동시에 해결하려는 시도로서, 기술적 기여가 다층적으로 구성된다. 첫째, 저자들은 스테레오 깊이 센서의 실제 결함을 정량화하고 이를 시뮬레이션에 반영하는 8단계 증강 파이프라인을 설계했다. 여기에는 불일치 기반 홀 생성, 거리 의존적 가우시안 노이즈, 다중 옥텟 퍼린 노이즈, 랜덤 컨볼루션을 통한 광학 왜곡, 캘리브레이션 스케일 변동, 픽셀 결함 마스킹, 깊이 클리핑 및 크롭 등이 포함된다. 각 단계는 실제 카메라에서 관찰되는 통계적 특성을 파라미터화하여, 환경마다 무작위 샘플링함으로써 도메인 랜덤화를 강화한다. 이러한 고충실도 센서 모델링은 기존 연구에서 흔히 간과된 “홀 패턴”과 “깊이 의존 노이즈”를 재현함으로써, 정책이 실제 센서 노이즈에 내성을 갖도록 만든다.
둘째, 행동 증류 메커니즘은 특권 관측(고해상도 높이 스캔)으로 학습된 교사 정책을, 노이즈가 섞인 깊이 영상만을 입력으로 하는 학생 정책에 전달한다. 여기서 핵심은 잠재 공간 정렬(latent alignment)과 노이즈 불변 보조 과제(contrastive consistency, denoising auto‑encoding)를 동시에 최적화하는 것이다. 교사 정책의 행동 로그와 학생 정책의 예측을 잠재 벡터 수준에서 매칭시키면서, 다양한 증강된 깊이 이미지에 대해 동일한 행동을 유지하도록 제약한다. 결과적으로 학생 정책은 깊이 센서의 불확실성을 무시하고, 교사 정책이 가진 정밀한 지형 인식을 간접적으로 학습한다.
셋째, 다중 지형 학습을 위해 저자들은 K=3개의 지형 카테고리(계단·플랫폼, 갭, 거친 지형)마다 별도의 가치 네트워크와 판별기를 배치한 멀티‑크리틱·멀티‑디스크리미네이터 구조를 도입했다. 공통 백본을 공유하면서도 출력 헤드를 분리함으로써 파라미터 효율성을 유지하고, 각 지형에 특화된 보상 shaping(예: 계단에서는 발판 정확도, 갭에서는 착지 안전성, 거친 지형에서는 충돌 회피)을 적용한다. 이 설계는 단일 가치 함수가 서로 상충되는 보상 신호를 혼합하는 문제를 회피하고, 정책이 지형별 최적 행동을 동시에 학습하도록 만든다.
마지막으로, 두 로봇 플랫폼(HONOR 로봇과 다른 스테레오 카메라 탑재 로봇)에서 실험을 수행해 시뮬‑실 전이 성공률을 검증하였다. 실험 결과는 고플랫폼·와이드 갭 같은 극한 장애물뿐 아니라, 연속적인 계단 오르내리기와 같은 센티미터 수준 정밀도가 요구되는 작업에서도 정책이 안정적으로 동작함을 보여준다. 이는 제안된 센서 시뮬레이션·증류·멀티‑크리틱 프레임워크가 인간형 로봇의 복합 지형 주행에 필요한 전반적인 일반화 능력을 제공한다는 강력한 증거이다.
댓글 및 학술 토론
Loading comments...
의견 남기기