다중스케일 주의 메커니즘을 활용한 포인트 클라우드 등록 오류 회귀
초록
본 논문은 포인트 클라우드 등록 품질을 이산 분류가 아닌 연속적인 회귀 방식으로 예측한다. 다중 스케일에서 추출한 기하학적 특징을 멀티헤드 어텐션으로 융합해 각 포인트에 최적의 이웃 반경을 자동 선택하도록 설계하였다. 실험 결과, 기존 분류 기반 방법들을 전반적으로 능가하며, 특히 밀도가 불균일한 데이터와 낮은 겹침 비율에서도 높은 정확도를 보인다. 또한, 추정된 오류를 활용해 매핑 파이프라인에서 재등록 대상 프레임을 효율적으로 선정함으로써 동일한 재등록 예산 하에서 지도 품질을 크게 향상시켰다.
상세 분석
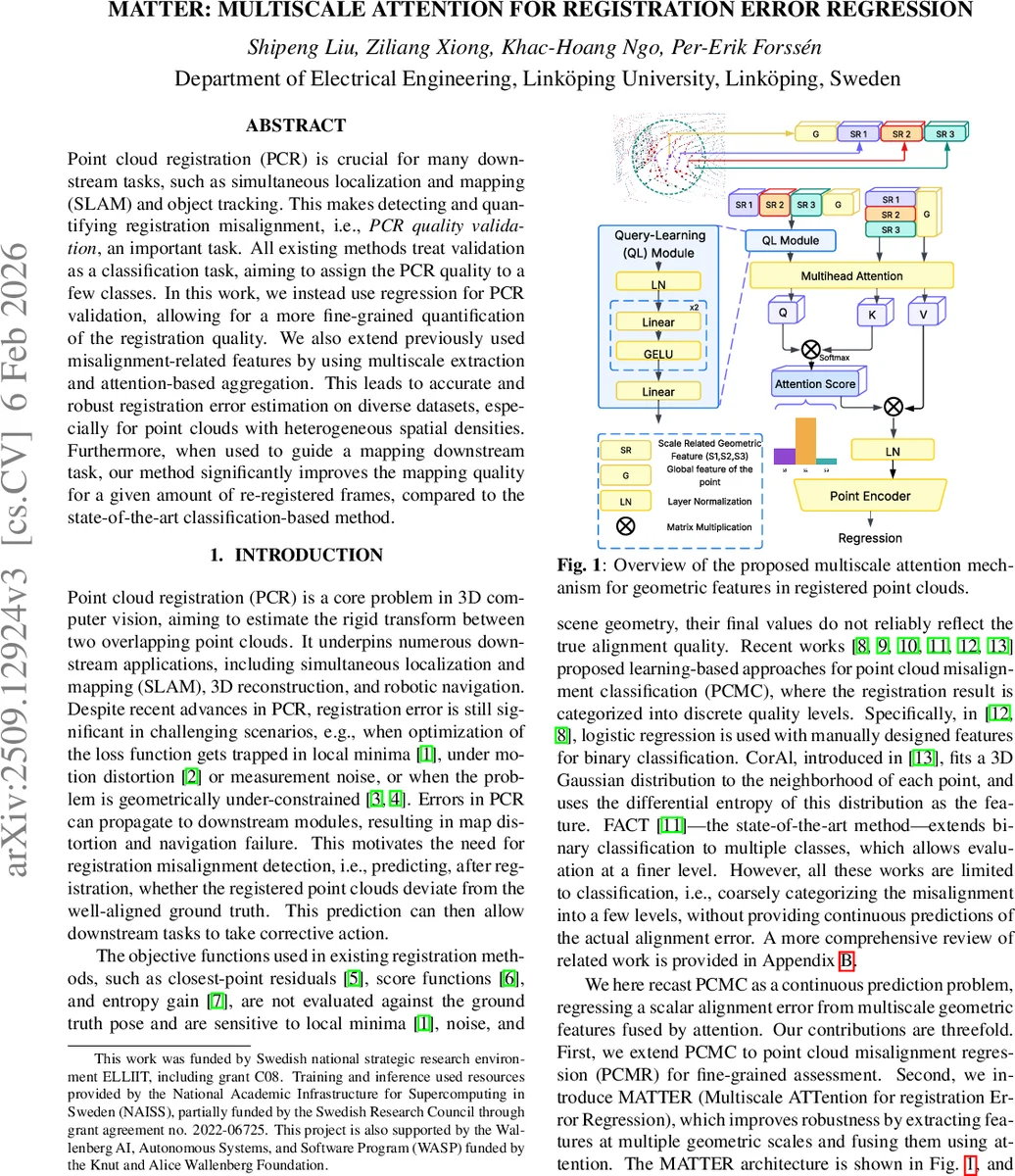
MATTER는 기존 포인트 클라우드 등록 오류 검증(PCMC)이 갖는 “분류 → 몇 개의 고정 클래스” 한계를 넘어, 실제 정합 오차를 연속적인 스칼라 값으로 회귀하는 새로운 프레임워크를 제시한다. 핵심 아이디어는 두 단계로 구성된다. 첫째, 각 앵커 포인트 주변에서 서로 다른 반경(r₁≈7.5 m, r₂≈4.0 m, r₃≈2.5 m)으로 이웃을 샘플링하고, 그 집합에 대해 5가지 기하학적 통계량(공동·개별 차분 엔트로피, Sinkhorn 발산, 공동·개별 커버리지 비율)을 계산한다. 여기에 전역적인 가시성 점수, 센서 거리, 소스/레퍼런스 플래그 등 3가지 보조 정보를 추가해 총 (5S+3) 차원의 피처 벡터를 만든다. 둘째, 이 피처를 멀티헤드 어텐션 네트워크에 입력해 스케일별 가중치 α(s)ᵢ를 학습한다. 어텐션은 각 헤드마다 쿼리·키·밸류 선형 변환을 수행하고, 온도 파라미터 τ를 통해 스케일 선택의 샤프함을 조절한다. 이렇게 얻어진 가중치는 스케일별 피처를 가중합해 하나의 8차원 임베딩을 만든 뒤, PointTransformer와 3‑layer MLP에 전달해 최종 정합 오차 E_align을 예측한다.
이 설계는 두 가지 중요한 문제를 해결한다. 첫째, 작은 반경은 정밀한 로컬 구조를 포착해 엔트로피 기반 특징이 신뢰성을 갖지만, 초기 정합이 크게 틀어졌을 때는 대응점이 이웃에 포함되지 않아 정보가 부족해진다. 반면 큰 반경은 대응점이 포함될 확률을 높이지만, 비균질한 분포와 비중첩 영역이 섞여 엔트로피·Sinkhorn 값이 왜곡된다. 어텐션 기반 스케일 선택은 상황에 따라 최적 반경을 자동으로 할당함으로써 이 트레이드오프를 동적으로 해결한다.
실험에서는 nuScenes‑ICP, nuScenes‑ICP(noisy), KITTI‑GeoTransformer 세 가지 벤치마크를 사용했다. 회귀 성능 평가지표(RMSE, MAE, R²)에서 모든 데이터셋에서 기존 F‑ACT, CorAl, KPConv‑based 등 분류 기반 모델을 변형한 회귀 버전을 능가했다. 특히 KITTI와 같이 낮은 오버랩·스캔 드롭아웃이 심한 경우, 단일 스케일 모델이 큰 오차를 보이는 반면, MATTER는 어텐션이 큰 스케일을 선택해 견고하게 오류를 추정한다. 파라미터 수는 거의 변동이 없으며(≈3.168 M), 멀티스케일 피처를 단순 연결(concatenation)했을 때보다 어텐션을 적용했을 때 RMSE가 평균 0.06 % 정도만 추가로 증가한다.
다운스트림 매핑 실험에서는 KITTI 시퀀스 10에 대해 5프레임마다 한 스캔을 선택해 GeoTransformer 기반 연속 정합을 수행하고, MATTER와 F‑ACT가 예측한 오류를 기준으로 재등록 대상 프레임을 동일 비율(≈39 %)만큼 선택했다. 최종 프레임의 정합 오차는 MATTER가 18.35 m, F‑ACT가 21.46 m로, 동일 재등록 비용에서도 MAPTER가 더 정확한 지도를 생성한다. 재등록 비율을 변화시킨 실험에서도 MATTER는 낮은 비율(7 %~40 %)에서 F‑ACT보다 현저히 낮은 최종 오류를 유지했다.
요약하면, MATTER는 (1) 오류 회귀라는 새로운 문제 정의, (2) 다중 스케일 기하학적 피처와 어텐션 기반 스케일 선택 메커니즘, (3) 실시간 매핑 파이프라인에 직접 적용 가능한 효율적인 오류 추정이라는 세 축을 성공적으로 결합했다. 이는 포인트 클라우드 기반 SLAM·재구성 시스템에서 정합 품질을 정량적으로 모니터링하고, 제한된 재등록 자원을 최적 배분하는 데 큰 잠재력을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기