실시간 얽힘 방지 해저 로봇 경로 계획 REACT
초록
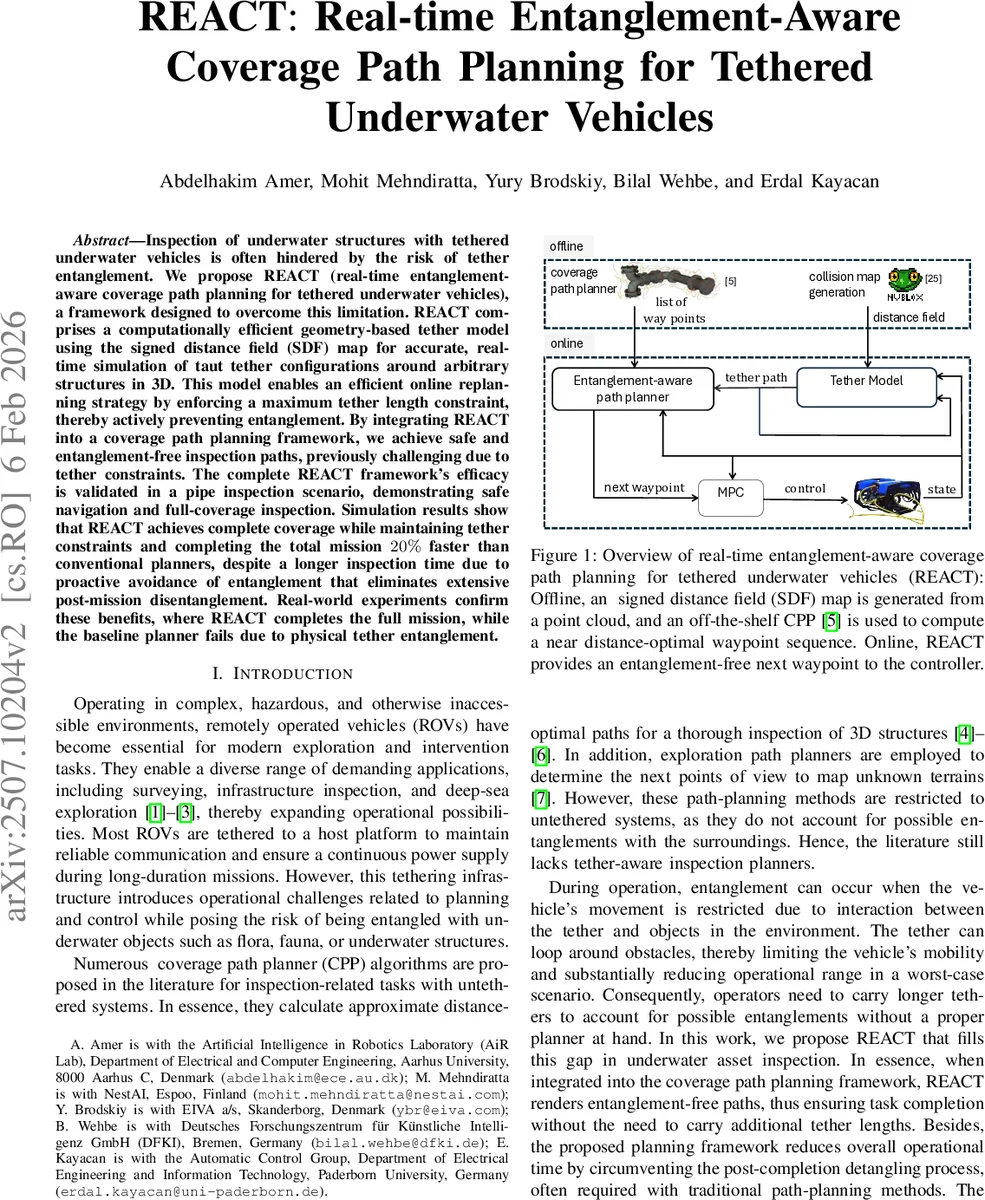
REACT는 서명 거리장(SDF) 기반의 기하학적 텐더 모델을 이용해 3차원 구조물 주변에서 텐더가 팽팽하게 유지되는 모습을 실시간으로 시뮬레이션한다. 오프라인에서 일반 CPP로 얻은 경로를 입력으로, 온라인에서는 텐더 길이 제한을 지속적으로 확인하며 정상 모드와 복구 모드 사이를 전환해 얽힘을 사전에 방지한다. 파이프 검사 실험에서 시뮬레이션·실험 모두 기존 플래너 대비 미션 시간을 20 % 단축하고, 물리적 얽힘으로 인한 실패를 방지한다.
상세 분석
본 논문은 텐더가 연결된 ROV의 실시간 운영에서 가장 큰 위험 요소인 얽힘을 정량적·정성적으로 모델링하고, 이를 기반으로 경로 재계획을 수행하는 프레임워크를 제시한다. 핵심은 두 단계로 나뉜다. 첫 번째는 오프라인 단계에서 포인트 클라우드로부터 nvblox 라이브러리를 이용해 서명 거리장(SDF) 맵을 생성하고, 기존의 커버리지 경로 플래너(FC‑Planner)를 적용해 구조물 전체를 커버하는 ‘명목적’ 웨이포인트 시퀀스를 만든다. 이 단계에서는 텐더 제약을 무시함으로써 기존 CPP가 제공하는 최적에 가까운 커버리지를 확보한다. 두 번째는 온라인 단계에서 텐더 모델링과 얽힘 방지 재계획을 담당한다. 텐더는 일정 간격(δ)으로 이산화된 노드 집합으로 표현되며, 각 노드 사이의 직선 가시성을 SDF를 통해 충돌 검사한다. 가시선이 확보되면 ‘shortcut’ 연산으로 중간 노드를 제거하고, 가시선이 차단되면 이전 노드로 이동해 반복한다. 이 과정은 ‘pull’ 연산과 결합돼 텐더가 항상 팽팽한 상태를 유지하도록 만든다. 알고리즘 1에 정리된 이 절차는 복잡한 3‑D 환경에서도 O(N²) 수준의 연산으로 수렴한다는 점에서 실시간 적용 가능성을 확보한다.
재계획 모듈은 현재 텐더 길이 L_tether를 실시간으로 측정하고, 사전 정의된 최대 허용 길이 L_max와 비교한다. L_tether ≤ L_max이면 ‘정상 모드’에서 명목 웨이포인트를 그대로 추적한다. 반대로 L_tether > L_max이면 ‘복구 모드’로 전환해 현재 웨이포인트까지 도달하면서 텐더 길이 제한을 만족하는 대체 경로를 탐색한다. 복구 경로는 텐더 경로를 역방향으로 따라가며, 각 노드에서 가시선이 확보되는 가장 가까운 위치를 선택하는 탐색(알고리즘 3)으로 구성된다. 이때도 SDF 기반 충돌 검사가 핵심 역할을 하며, 복구 경로가 완성되면 다시 정상 모드로 복귀한다. 이러한 이중 모드 설계는 텐더가 과도하게 늘어나거나 얽히는 상황을 사전에 차단하면서도 미션 진행을 최소한으로 방해한다는 장점을 가진다.
실험에서는 파이프형 구조물에 대한 시뮬레이션과 실제 수중 테스트를 수행했다. 시뮬레이션 결과, REACT는 전체 커버리지를 100 % 달성하면서 텐더 길이 제한을 항상 만족했고, 미션 전체 시간을 기존 플래너 대비 약 20 % 단축했다. 비록 개별 검사 구간에서의 이동 시간이 약간 늘었지만, 사후에 발생하는 얽힘 해제 작업을 완전히 없앴기 때문에 총 효율이 향상된 것이다. 실제 수중 실험에서도 REACT는 텐더가 파이프 주변을 안전하게 통과하도록 제어했으며, 비교 대상인 기존 플래너는 텐더가 파이프에 걸려 물리적으로 멈추는 실패를 보였다.
기술적 기여는 네 가지로 요약된다. 첫째, SDF 기반의 기하학적 텐더 모델을 통해 실시간에 가까운 텐더 시뮬레이션을 구현했다. 둘째, 텐더 길이 제한을 명시적으로 포함한 온라인 재계획 알고리즘을 제시해 얽힘을 사전 방지했다. 셋째, 오프라인 커버리지 플래너와 온라인 텐더 관리 모듈을 모듈화하여 기존 시스템에 손쉽게 통합할 수 있는 구조를 제공했다. 넷째, 시뮬레이션·실험 모두에서 텐더 얽힘 없이 완전 커버리지를 달성함으로써 실용성을 입증했다.
한계점으로는 텐더가 완전히 팽팽하다고 가정한 점이다. 실제 수중 환경에서는 텐더가 유연하게 휘어지거나 물 흐름에 의해 변형될 수 있어, 모델링 오차가 발생할 가능성이 있다. 또한 SDF 해상도가 낮은 경우 가시선 검사가 부정확해져 텐더가 장애물을 통과하는 비현실적인 결과가 나올 수 있다. 향후 연구에서는 텐더의 탄성·유동 특성을 포함한 물리 기반 모델링과, 동적 환경(예: 흐름, 움직이는 장애물)에서의 적응형 재계획을 탐구할 필요가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기