대화형 인간‑로봇 인터페이스가 휠체어‑팔 통합 제어에 미치는 영향
초록
본 연구는 휠체어에 장착된 6자유도 로봇 팔과 휠체어를 동시에 제어할 수 있는 시스템에 자연어 대화를 적용한 파일럿 실험을 수행하였다. 5명의 비장애 참가자를 대상으로 Wizard‑of‑Oz 방식으로 대화형 제어와 전통적인 조이스틱·게임컨트롤러 기반 수동 제어를 비교했으며, 설문 결과 대화형 인터페이스가 사용성·신뢰도 측면에서 긍정적인 평가를 받았다.
상세 분석
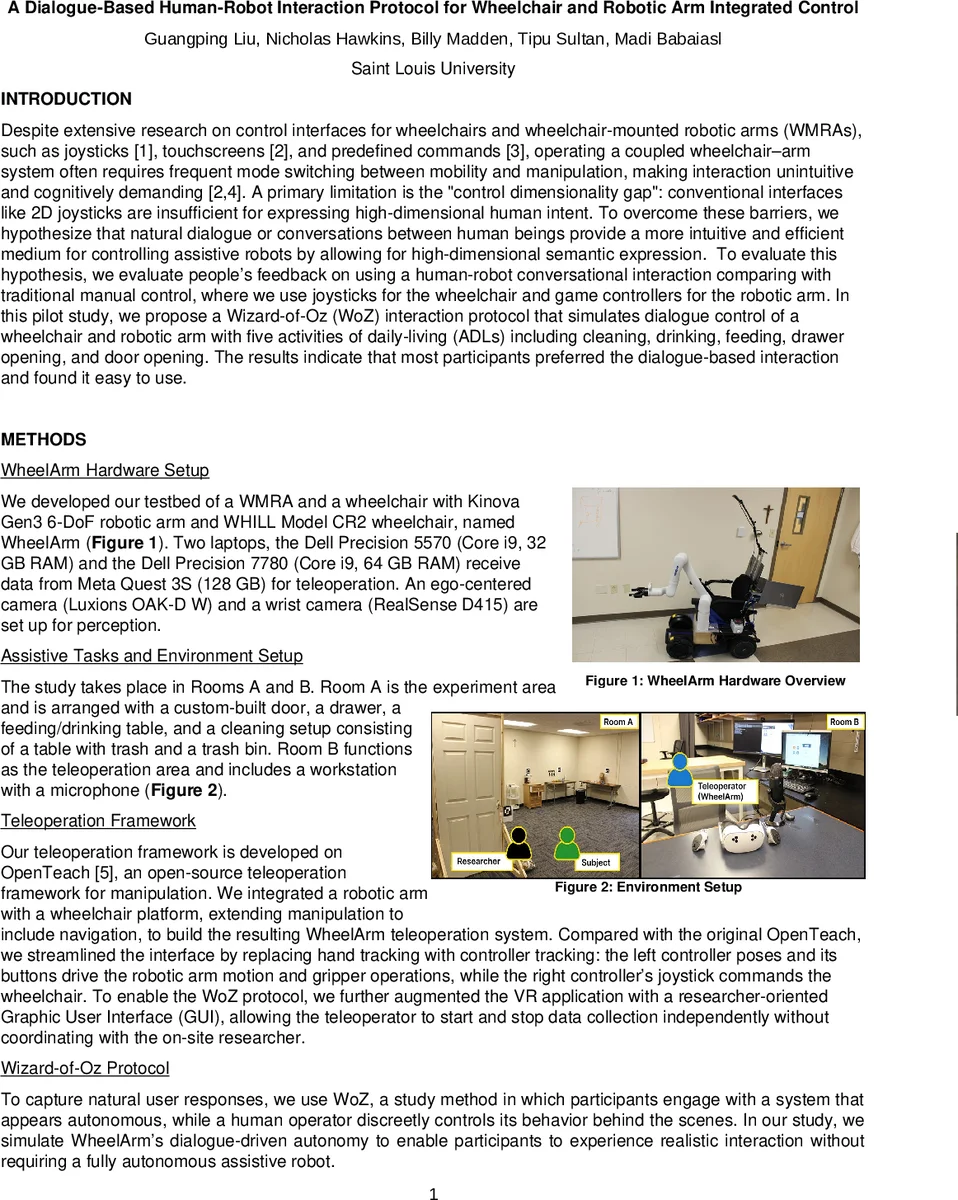
이 논문은 휠체어‑로봇 팔 통합 시스템(WheelArm)의 인간‑로봇 상호작용(HRI) 방식을 ‘대화 기반’으로 전환함으로써 기존 조이스틱·터치스크린 등 2차원 입력 장치가 갖는 ‘제어 차원 격차’를 메우려는 시도를 담고 있다. 하드웨어는 Kinova Gen3 6‑DoF 팔과 WHILL Model CR2 휠체어를 결합했으며, 두 대의 고성능 노트북이 Meta Quest 3S와 연동돼 VR 기반 텔레오퍼레이션을 구현한다. 인식 센서는 Ego‑centered OAK‑D W와 손목에 장착된 RealSense D415를 활용해 로봇의 부분적 관측성을 재현하였다.
텔레오퍼레이션 프레임워크는 오픈소스 OpenTeach를 기반으로 하며, 손 추적을 컨트롤러 트래킹으로 대체해 조작성을 높였다. 왼쪽 컨트롤러는 팔의 포즈와 그리퍼 제어, 오른쪽 컨트롤러는 휠체어 이동을 담당한다. 대화형 제어를 구현하기 위해 두 명의 연구원이 참여하는 Wizard‑of‑Oz(WoZ) 프로토콜을 도입했는데, 한 명은 원격 텔레오퍼레이터 역할을, 다른 한 명은 현장에 배치돼 참가자와 직접 상호작용한다. 모든 대화는 Zoom 오디오 채널을 통해 전달되고, w‑okada 음성 변조 시스템으로 로봇 전용 목소리를 생성해 일관된 로봇 페르소나를 유지한다.
실험은 비장애 성인 5명을 대상으로 진행됐으며, 각자는 청소·음료 제공·식사·서랍 열기·문 열기 등 5가지 일상 작업을 수행했다. 대화형 제어 후에는 조이스틱·Xbox 컨트롤러를 이용한 수동 제어를 수행하고, 두 단계 모두 사후 설문지를 작성했다. 설문은 대화형 HRI 만족도(5문항)와 자동화 vs 수동 제어 선호도(5문항)로 구성됐으며, Likert 5점 척도로 응답을 수집했다. 내부 일관성은 Cronbach’s α로 평가했으며, 첫 번째 척도는 0.87(높은 신뢰도)을 보였으나 두 번째 척도는 0.26으로 일관성이 낮았다. 이는 비장애 참가자가 수동 제어에 대한 익숙함과 기대 차이 때문으로 해석된다.
점수 분석에서는 ‘대화형 제어가 직관적이다’, ‘자율성에 만족한다’, ‘신뢰한다’ 등의 항목에서 중위값이 4(동의) 이상이며, 상위 4‑5점 비율(Top‑box)이 60‑80%에 달해 전반적인 긍정적 인식을 확인했다. 개방형 질문의 주제 분석에서는 대화 인식 능력에 대한 호평, 작업 범위 확대 요구(요리·식기세척 등), 응답 속도 개선 요구가 도출됐다.
한계점으로는 표본 규모가 작고 비장애자를 대상으로 했다는 점, WoZ 방식이 실제 자율 로봇의 오류를 충분히 반영하지 못한다는 점, 그리고 두 번째 Likert 척도의 낮은 신뢰도가 있다. 향후 연구에서는 실제 장애인 사용자 대상 확대, 완전 자율 대화 엔진 구현, 실시간 감정·상황 인식 통합 등을 통해 시스템의 실용성을 높일 필요가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기