정책 기반 다중 운영자 비지상 네트워크 오케스트레이션 프레임워크
초록
본 논문은 위약 제어(weak‑control) 개념을 도입해 다중 NTN(비지상) 운영자 간 협업을 가능하게 하는 오케스트레이션 프레임워크를 제안한다. 중앙 집중형 라우팅 대신 오케스트레이터가 여러 후보 경로를 제공하고, 각 운영자는 자체 정책에 따라 최적의 경로를 선택한다. 시뮬레이션을 통해 정책 충돌 해결 과정과 “자율성의 대가”를 정량화하고, 협업이 엔드‑투‑엔드 가용성·지연·홉 수에 미치는 영향을 분석한다.
상세 분석
이 연구는 기존의 중앙집중형 NTN 오케스트레이션이 갖는 두 가지 근본적인 한계를 지적한다. 첫째, 모든 라우팅 결정을 오케스트레이터가 독단적으로 내리면 각 운영자의 SLA·보안·자산 보호 정책을 위배할 위험이 있다. 둘째, 운영자들이 정책 세부 정보를 제3자에게 공개하기 꺼려하는 현실을 반영하지 못한다. 이를 해결하기 위해 저자들은 인간‑인‑루프 시스템에서 사용되는 ‘weak‑control’ 개념을 차용하였다. 약한 제어는 전역 컨트롤러가 허용 가능한 행동 집합(여기서는 후보 경로)을 제시하고, 각 의사결정자는 자신의 목표와 제약에 따라 그 중 하나를 선택하도록 한다. 이 구조는 전역적인 가용성·공정성을 보장하면서도 개별 운영자의 자율성을 유지한다는 점에서 혁신적이다.
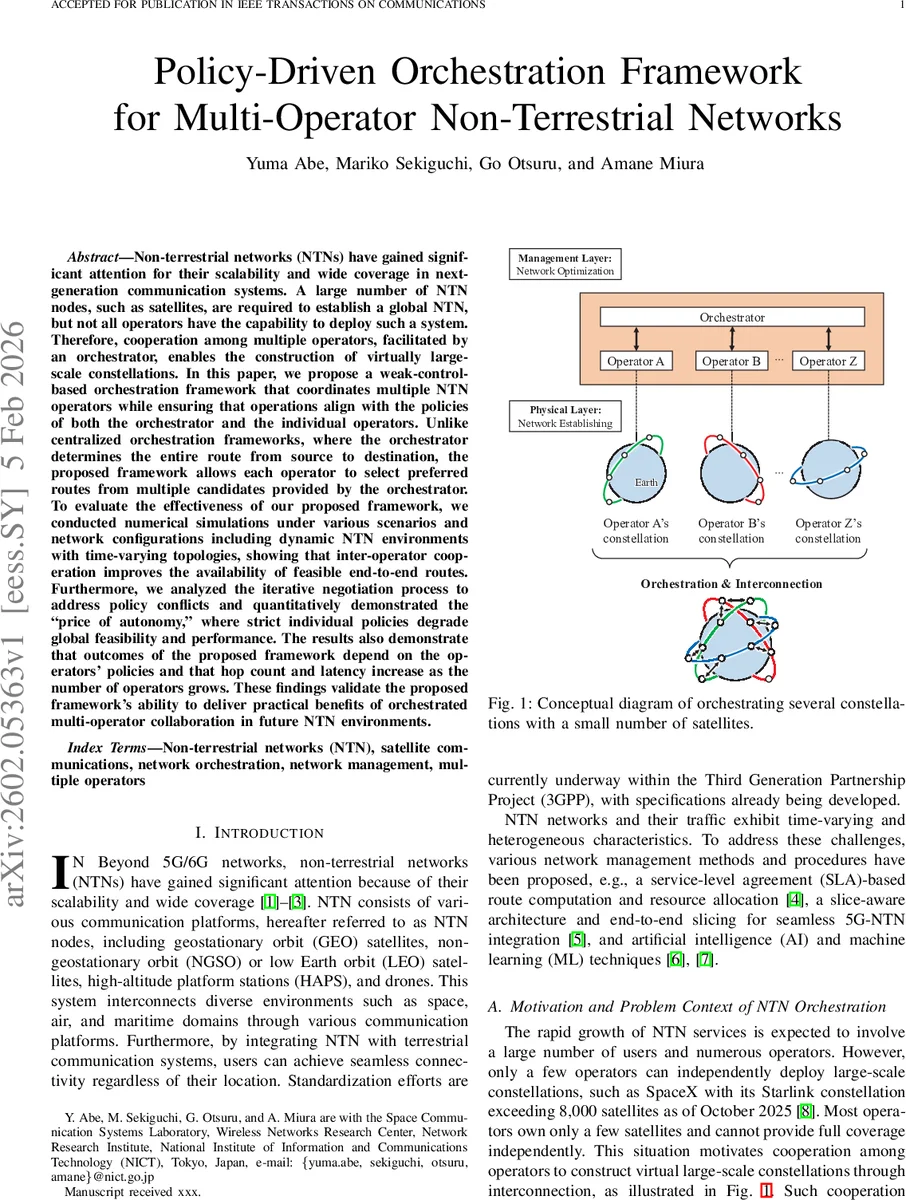
프레임워크는 세 단계로 구성된다. (1) 오케스트레이터는 각 운영자의 위성·지상 노드 정보를 수집해 전체 그래프 (V,E)를 구축하고, 물리적·링크 품질 제약(시야, 거리, C/N, 광전력 등)을 적용해 시간‑가변 가능한 ‘가능 링크 집합’을 도출한다. (2) 오케스트레이터는 소스‑목적지 쌍에 대해 다수의 후보 경로를 생성하고, 각 경로에 대한 지연·홉·인터‑운영자 연결 수 등 메트릭을 계산한다. (3) 각 운영자는 사전에 정의한 정책 π_i(예: 최대 지연 제한, 홉 수 제한, 특정 노드 회피 등)를 적용해 후보 중 하나를 선택한다. 선택된 경로가 전역 제약(C_0)을 만족하면 최종 라우팅이 확정된다.
정책 표현은 평가 함수 J_π와 제약 집합 C_π로 형식화된다. 예를 들어, π_ML은 지연 최소화를, π_MH는 홉 수 최소화를, π_AN(V_a)는 특정 노드 집합 V_a 회피를 의미한다. 정책 충돌이 발생하면 오케스트레이터와 운영자 간에 반복 협상(iterative negotiation)이 수행되며, 이 과정에서 ‘자율성의 대가(price of autonomy)’가 정량화된다. 즉, 정책이 엄격할수록 전역 최적 해와의 격차가 커지고, 가용 경로 수가 감소한다.
시뮬레이션에서는 GEO·LEO·HAPS 혼합 토폴로지를 사용해 동적 위성 배치와 트래픽 흐름을 모델링하였다. 실험 결과는 다음과 같다. (1) 운영자 수가 증가할수록 인터‑운영자 연결 수와 홉 수가 늘어나지만, 전체 가용 경로 비율은 상승한다. (2) 정책이 완화될수록 평균 지연이 크게 감소하고, 라우팅 성공률이 20 % 이상 향상된다. (3) ‘price of autonomy’는 정책 제약이 강화될수록 지연·홉·연결 수 측면에서 10 %~30 % 수준의 성능 손실을 초래한다. 이러한 결과는 제안된 약한 제어 기반 프레임워크가 실제 NTN 환경에서 다중 운영자 협업을 촉진하면서도 정책 준수를 보장할 수 있음을 실증한다.
전반적으로 이 논문은 정책‑주도형 오케스트레이션을 위한 새로운 수학적 모델과 해결 절차를 제시하고, 실험을 통해 그 실용성을 검증한다. 향후 연구에서는 머신러닝 기반 후보 경로 생성, 실시간 정책 업데이트 메커니즘, 그리고 보안·프라이버시 강화 방안 등을 통합함으로써 프레임워크를 더욱 확장할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기