플라토 핸드 손톱을 이용한 정밀 조작을 위한 접촉 설계
초록
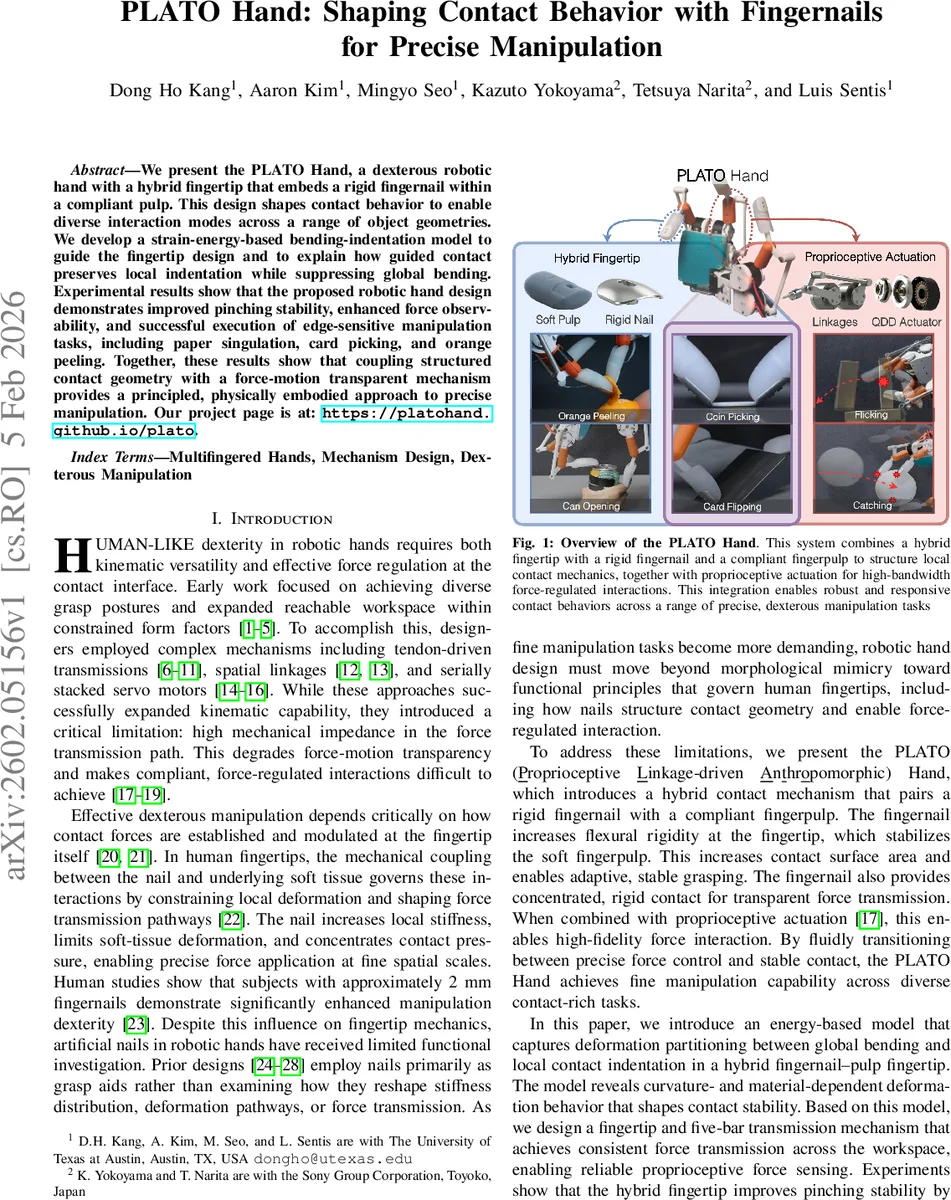
플라토 핸드는 강성 손톱과 연성 손가락 살을 결합한 하이브리드 핑거팁을 도입해 접촉 변형을 전역 굽힘과 국부 압입으로 분리한다. 변형 에너지 최소화 모델을 기반으로 손톱이 접촉 면적을 유지하면서 전체 굽힘을 억제하도록 설계했으며, 5‑바 링크와 저감속 구동(QDD)으로 높은 힘‑운동 투명성을 확보한다. 실험에서는 손톱이 있는 경우 평면·볼록·오목 표면 모두에서 잡아당김 저항이 크게 증가하고, 얇은 종이, 카드, 오렌지 껍질 벗기기 등 정밀 조작 과제를 성공적으로 수행한다.
상세 분석
플라토 핸드의 핵심 혁신은 인간 손끝의 손톱‑살 구조를 기계적으로 모사한 하이브리드 핑거팁에 있다. 저항성 손톱은 국부적인 강성을 크게 높여 손가락 전체가 휘어지는 전역 굽힘을 억제하고, 연성 살은 접촉면에 대한 순응성을 제공한다. 논문에서는 이를 정량화하기 위해 “변형 에너지 기반 굽힘‑압입 모델”을 제시한다. 전체 변위 δ_total을 전역 굽힘 변위 δ_b와 접촉 압입 변위 δ_c 로 분해하고, 각각의 탄성 에너지 U_b, U_c 를 적분해 구한다. 손톱이 존재하면 복합 빔의 유효 굽힘 강성 (EI)_eff 가 크게 증가해 파라미터 β 가 감소하고, 최적화된 에너지 최소화 조건 하에서 δ_c ≈ δ_total 로 전환된다. 즉, 손톱이 접촉 부위에 에너지를 집중시켜 접촉 반경 a 를 확대하고, 접촉 압력 분포를 균일하게 만든다.
또한, 손톱‑살 구조의 설계 파라미터(손톱 두께, 살의 경도, 길이 비율)를 변화시켜 에너지 분포 히트맵을 분석한 결과, 손톱 강성이 10배 이상일 때 전체 변형 에너지의 95 % 이상이 압입에 할당되는 것을 확인했다. 이는 얇은 물체를 잡을 때 손가락이 과도하게 휘어지지 않아 안정적인 핀칭을 가능하게 한다.
구동 메커니즘 측면에서는 5‑바 링크를 이용해 각 손가락의 원위 관절을 원거리 QDD 액추에이터와 연결한다. 링크 기하학에 따라 기계 이득 N(φ₂, φ₄) 가 변동하는데, 설계 최적화(목표 J = w₁‖Δθ‖² + w₂σ_N + w₃TI + w₄‖L‖²) 를 통해 링크 길이 L₁, L₃ 를 조정함으로써 작업공간 전반에 걸친 이득 변동을 최소화하고, 힘‑토크 센서의 선형성을 확보한다. 이는 고대역폭의 고감도 힘 관측을 가능하게 하며, 실험에서 저주파 8 dB, 고주파 20 dB 이상의 센서 감도 향상이 보고되었다.
실험 결과는 세 가지 주요 측면에서 손톱의 효과를 입증한다. 첫째, 평면, 오목, 볼록 표면에 대한 풀‑아웃 테스트에서 손톱이 있는 하이브리드 팁은 최대 잡아당김 힘을 23 %~78 % 향상시켰다. 둘째, 힘 관측 실험에서는 손톱이 접촉 면적을 유지하면서 변형을 압입에 집중시켜, 동일한 전압 입력 대비 힘 출력 변동을 크게 감소시켰다. 셋째, 종이 싱귤레이션, 카드 피킹, 오렌지 껍질 벗기기 등 정밀 조작 과제에서 손톱이 없는 전통적인 연성 팁은 물체가 미끄러지거나 손가락이 휘어져 실패하는 반면, 하이브리드 팁은 80 % 이상의 성공률을 기록했다.
이러한 결과는 “구조화된 접촉 기하학 + 투명 구동 메커니즘”이라는 설계 원칙이 로봇 손의 정밀 조작 능력을 물리적으로 구현할 수 있음을 보여준다. 특히, 손톱이 제공하는 국부 강성 증강은 기존의 복합 재료 설계나 단순 연성 팁만으로는 달성하기 어려운 얇은 물체에 대한 안정적인 핀칭과 고감도 힘 피드백을 동시에 제공한다는 점에서 학계·산업계 모두에게 중요한 시사점을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기