시간적 합의 최적화로 지속 가능한 신경 매핑
초록
본 논문은 로봇의 연속적인 환경 변화에 대응하기 위해, 과거 모델 스냅샷을 시간적 이웃으로 활용하는 무 replay 프레임워크 TACO를 제안한다. 중요도 가중치를 적용한 시간적 합의 최적화를 통해, 신뢰할 수 있는 과거 기하 정보를 보존하면서도 최신 관측에 따라 오래된 영역을 자유롭게 수정한다. 메모리와 연산량을 최소화하면서도 동적 장면에서 기존 지속 학습 기법들을 능가하는 성능을 보인다.
상세 분석
TACO는 기존 신경 임플리시트 매핑 시스템이 직면한 두 가지 근본적인 문제—과거 데이터를 저장·재생하는 메모리 부담과, 동적 환경에서 발생하는 데이터 충돌로 인한 맵 품질 저하—를 동시에 해결한다. 핵심 아이디어는 “시간적 합의”(temporal consensus)를 도입해 현재 모델 파라미터 Θₜ를 과거 스냅샷 Θₜ₋₁과 가중 평균(zₜ,ₜ₋₁) 형태로 결합하는 것이다. 여기서 가중 행렬 Wₜ, Wₜ₋₁은 파라미터별 중요도를 나타내며, 중요도는 MAS와 유사하게 출력에 대한 민감도(∂output/∂θ)로 추정한다. 중요도가 높은 파라미터는 과거 모델과의 일치를 강하게 강제하고, 낮은 파라미터는 새로운 관측에 따라 자유롭게 업데이트된다.
수학적으로는 제약식 Θ = zₜ,ₜ₋₁을 Augmented Lagrangian 방식으로 풀어,
Lₐ = L_obj(Θ, Rₜ₊₁) + (Θ−zₜ,ₜ₋₁)ᵀp + (ρ/2)‖Θ−zₜ,ₜ₋₁‖²
를 최소화한다. 여기서 L_obj는 Co‑SLAM 기반의 RGB‑D 재구성 손실(색상, 깊이, SDF, 평활성 등)이며, p와 ρ는 각각 듀얼 변수와 페널티 파라미터다. 프라임 업데이트는 소수의 SGD 스텝으로 근사하고, 듀얼 업데이트는 표준 ADMM 규칙을 따른다.
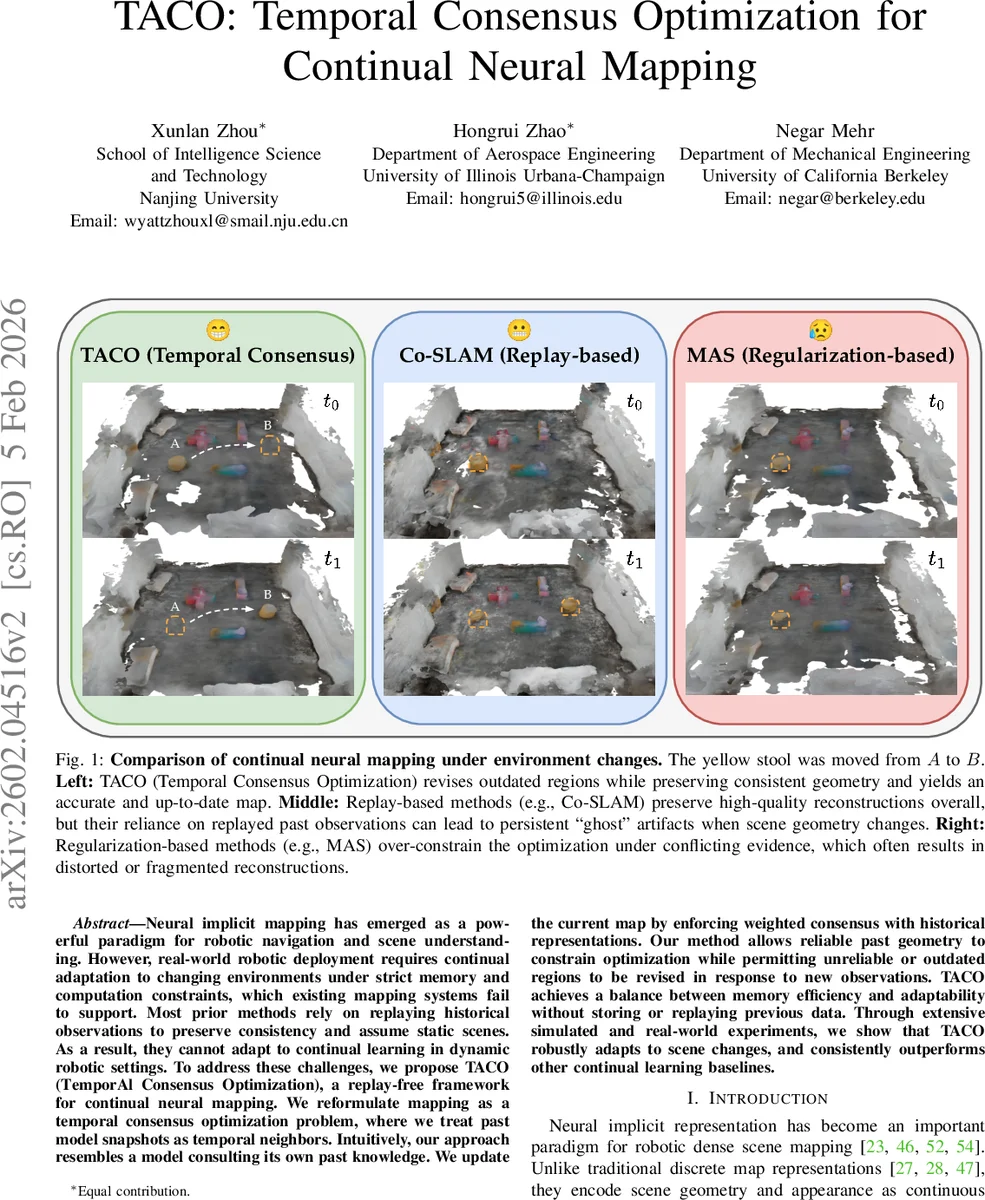
이 구조는 기존 replay‑based 방법이 과거 프레임을 재사용해 “유령” 아티팩트를 남기는 문제를 회피한다. 또한, MAS·EWC와 같은 정규화 기반 방법이 과도하게 파라미터를 고정해 새로운 변화를 수용하지 못하는 상황을 완화한다. TACO는 시간적 합의를 “가중 평균” 형태로 구현함으로써, 과거 모델이 제공하는 신뢰도 높은 기하 정보를 “제약”으로 활용하면서도, 중요도에 따라 유연하게 파라미터를 조정한다.
실험에서는 시뮬레이션 환경과 실제 로봇 플랫폼 모두에서 물체 이동, 조명 변화, 구조 재배치 등 다양한 동적 시나리오를 설정하였다. 정량적 평가지표(Chamfer 거리, PSNR, 구조 일관성)에서 TACO는 Co‑SLAM(Replay), UNIKD(Distillation), MAS(Regularization) 등을 모두 앞섰으며, 특히 “ghost” 현상이 최소화되고, 최신 장면을 빠르게 반영하는 데 뛰어났다. 메모리 사용량은 과거 프레임을 저장하지 않으므로 기존 방법 대비 30%~50% 절감되었다.
한계점으로는 중요도 추정이 파라미터 규모가 큰 해시 그리드에 대해 근사적으로 수행되므로, 매우 복잡한 장면에서는 가중치가 부정확할 수 있다. 또한, 현재 구현은 바로 직전 스냅샷만을 사용했으며, 다중 과거 스냅샷을 효율적으로 관리하는 전략은 향후 연구 과제로 남는다.
요약하면, TACO는 “시간적 합의”라는 새로운 관점을 통해 지속적인 신경 매핑에서 기억과 적응 사이의 트레이드오프를 효과적으로 조정한다. 메모리 효율성, 연산 효율성, 그리고 동적 환경 적응성 측면에서 현존하는 지속 학습 기법들을 능가하는 실용적인 솔루션을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기