로봇 제어 소프트웨어 구현 품질: 이론과 실전 사이의 격차
초록
본 연구는 ROS 기반 오픈소스 로봇 프로젝트 141개에서 184개의 제어기 구현을 분석한다. 연속시간 설계와 이산시간 실행 사이의 불일치, 실시간 제약 위반, 부실한 테스트·검증 관행이 발견되었으며, 이를 통해 구현 가이드와 형식 검증 기법의 필요성을 강조한다.
상세 분석
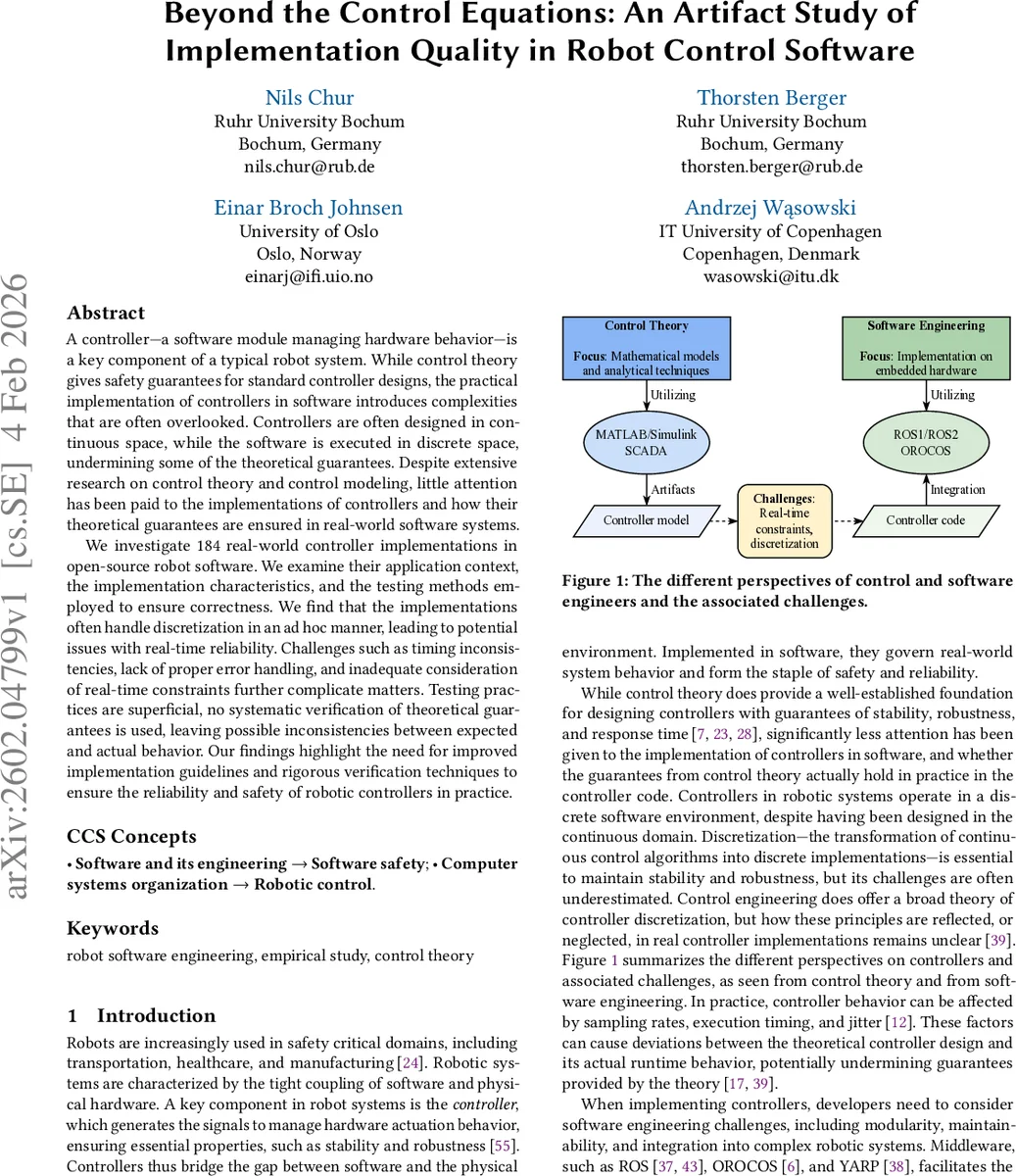
이 논문은 로봇 제어기의 이론적 보증이 실제 소프트웨어 구현 단계에서 어떻게 약화되는지를 실증적으로 조사한다. 먼저, 제어 이론에서는 연속시간 모델을 기반으로 안정성, 강인성, 응답시간 등을 수학적으로 증명하지만, 실제 로봇 소프트웨어는 이산시간 환경에서 실행된다. 연구팀은 ROS와 ROS2 생태계에서 141개의 저장소를 체계적으로 선별하고, 각 저장소에서 제어 루프 구현 방식을 코드 수준에서 추출하였다. 분석 결과, 대부분의 구현이 샘플링 주기와 실행 시간의 변동성을 고려하지 않은 ‘암묵적’ 이산화 방식을 채택하고 있었으며, 이는 제어 이론이 전제하는 고정 주기 가정을 깨뜨려 진동, 오버슈트, 심지어 불안정까지 초래할 위험이 있다. 특히, 실시간 운영체제(RTOS)와의 연동이 미비하거나, ROS의 기본 타이머를 그대로 사용해 jitter와 deadline miss가 빈번히 발생한다는 점이 지적된다.
코드 구조 측면에서는, 컨트롤러가 별도 클래스로 캡슐화된 경우가 드물고, 전역 변수나 오래된 센서 값에 대한 검증 로직이 부족했다. 오류 처리 메커니즘도 거의 없으며, 예외 상황(예: 센서 데이터 손실, 통신 지연)에서 안전 모드 전환이 구현되지 않은 사례가 다수 발견되었다.
검증·검증(V&V) 관행을 살펴보면, 단위 테스트와 시뮬레이션 기반 테스트가 소수에 불과하고, 대부분은 ‘빌드 성공 여부’ 정도에 머물렀다. 제어 이론이 제공하는 안정성·수렴 보증을 코드 수준에서 검증하는 형식적 방법(예: 모델 검증, 코딩 규칙 자동 검사)은 전혀 사용되지 않았다. 일부 프로젝트는 MATLAB/Simulink 모델을 기반으로 자동 코드 생성기를 활용했지만, 생성된 코드를 수정하거나 직접 구현한 경우 이산화 파라미터가 손실되는 문제가 관찰되었다.
이러한 결과는 로봇 제어 소프트웨어가 현재 ‘제어 설계’와 ‘소프트웨어 구현’ 사이에 명확한 인터페이스와 검증 절차가 부재함을 보여준다. 논문은 제어 엔지니어와 소프트웨어 엔지니어 간의 지식 격차, 미비한 중간 계층(예: ros_control)의 설계 가이드 부족, 그리고 실시간 특성을 고려한 테스트 프레임워크 부재가 주요 원인이라고 결론짓는다.
댓글 및 학술 토론
Loading comments...
의견 남기기