동적 제약 강화와 수축 분석을 활용한 비선형 MPC 기반 자율 레이싱 제어
초록
본 논문은 제한된 타이어 파라미터 불확실성과 외란을 고려한 동적 단일 트랙 모델에 대해 제어 수축 메트릭(CCM)을 설계하고, 이를 이용해 동적인 동형 튜브를 생성함으로써 제약 강화된 비선형 MPC를 구현한다. 제안된 방법은 추가적인 상태 변수 하나만을 도입해 계산량을 크게 늘리지 않으면서도, 제한에 근접할 때만 튜브를 확장해 불필요한 보수성을 최소화한다. 시뮬레이션 결과는 제안된 튜브가 제한 위반 위험이 높은 구간에서 크게 확장되며, 모든 불확실한 궤적을 포괄함을 보여준다.
상세 분석
이 연구는 고속 주행 및 레이싱 상황에서 차량이 물리적 한계에 도달할 때 필요한 견고한 경로 추적 제어기를 설계하는 데 초점을 맞춘다. 기존의 비선형 MPC는 모델 불확실성과 외란에 취약해 제약 위반이나 재귀적 실현 가능성 상실을 초래할 수 있다. 이를 해결하기 위해 저자는 두 단계의 접근법을 제안한다. 첫 번째 단계는 제한된 파라미터 변동(특히 Pacejka 타이어 모델의 피크 계수 D)과 외부 힘 교란을 포함한 불확실성 모델을 정의하고, 이를 단순화한 동적 단일 트랙 모델에 적용한다. 두 번째 단계에서는 이 불확실성 모델에 대해 제어 수축 메트릭(Control Contraction Metric, CCM)을 최적화한다. CCM은 시스템이 피드백을 통해 모든 궤적이 서로 수축하도록 보장하는 상태 의존적인 양의 정부호 행렬 M(x)이며, 이를 통해 시스템의 수축률 β와 피드백 행렬 K를 동시에 설계한다.
저자는 CCM을 구하기 위해 이중 메트릭 W = M⁻¹ 형태의 LMI를 다항식 근사와 SOS(Sum‑of‑Squares) 프로그래밍으로 변환한다. 여기서 차동 피드백 K는 W와 연계된 변수 Y = K·W 로 나타내며, 다항식 차수를 4 이하로 제한해 계산 복잡성을 제어한다. 타이어 비선형성을 선형 근사하고, 삼각함수는 차슈브예프 다항식(3차)으로 근사함으로써 전체 시스템을 다항식 형태로 만든다. 이러한 근사는 정확도와 계산 효율 사이의 균형을 맞추며, 실제 시뮬레이션에서는 다양한 극한 주행 시나리오와 낙관적 궤적을 통해 수축률을 검증한다.
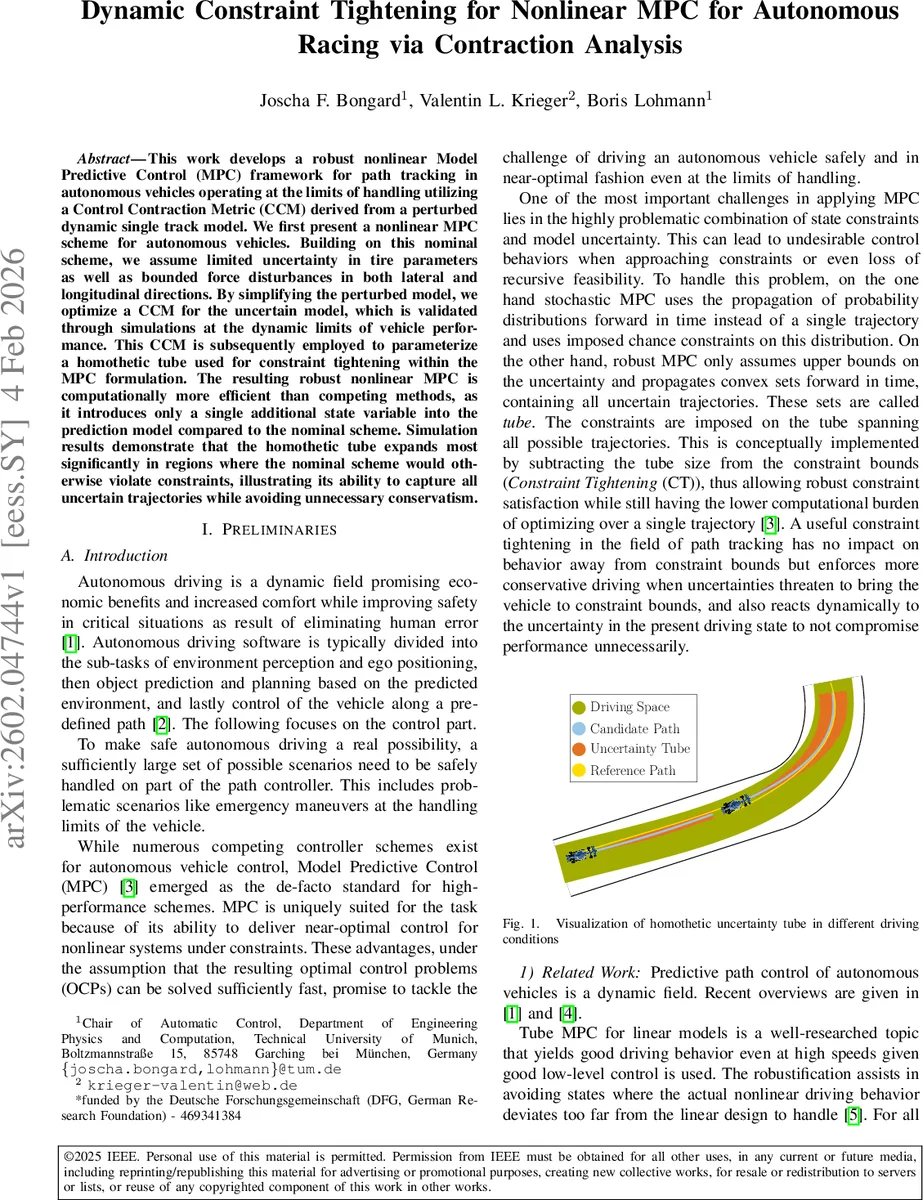
CCM이 확보되면, 이를 이용해 동형(동비례) 튜브를 정의한다. 튜브의 크기 파라미터는 하나의 추가 상태 변수(튜브 스케일)로 표현되며, 이 변수는 현재 상태와 불확실성 경계에 따라 동적으로 업데이트된다. 튜브는 제한에 가까워질수록 확대되고, 제한에서 멀어지면 축소되어 보수성을 최소화한다. 이렇게 정의된 튜브를 기존 비선형 MPC의 제약식에 적용하면, 제약 강화(Constraint Tightening) 형태로 로버스트한 최적 제어문제가 된다.
계산 복잡도 측면에서, 기존의 로버스트 비선형 MPC는 다중 샘플링이나 복합 폴리토프 전파를 통해 고차원 집합을 다루어 실시간 적용이 어려웠다. 반면 제안된 방법은 튜브 스케일 하나만을 추가함으로써 OCP의 차원을 거의 변형시키지 않는다. 시뮬레이션에서는 20 ms 이하의 계산 시간을 유지하면서도, 제한 위반을 완전히 방지하고, 차량이 물리적 한계에 도달했을 때도 안정적인 추적 성능을 보였다.
이 논문의 주요 기여는 (1) 차량 동역학에 특화된 CCM을 최초로 설계한 점, (2) CCM 기반 동형 튜브를 이용해 제약을 동적으로 강화함으로써 보수성을 최소화한 점, (3) 추가적인 상태 변수 하나만으로 실시간 로버스트 비선형 MPC를 구현한 점이다. 이러한 접근은 고속 레이싱뿐 아니라, 제한이 엄격한 자율 주행 전반에 적용 가능성을 시사한다.
댓글 및 학술 토론
Loading comments...
의견 남기기