대형 물체 재배치를 위한 자율 다리 로봇 매니퓰레이터 시스템 ALORE
초록
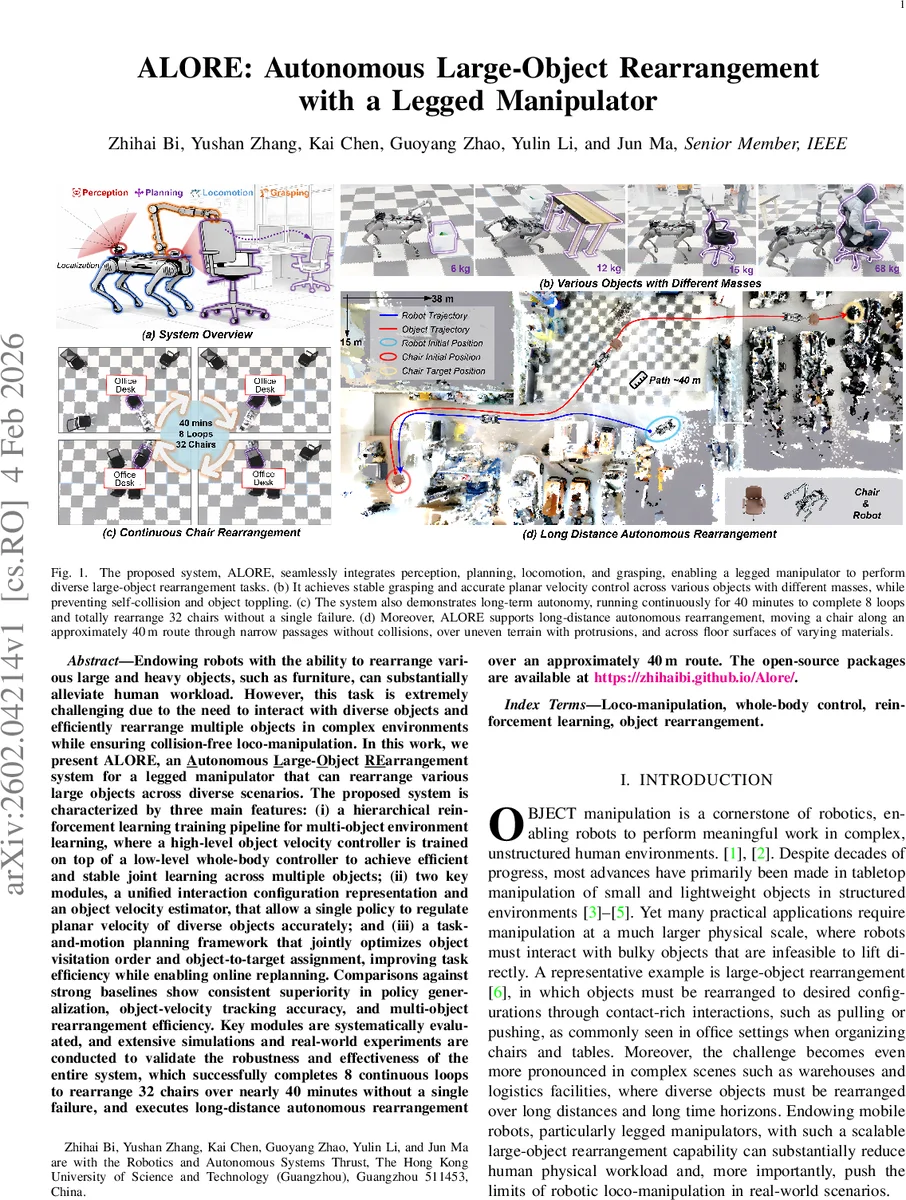
ALORE는 다리형 로봇에 매니퓰레이터를 장착해 의자·테이블·상자 등 무겁고 부피가 큰 물체를 자동으로 이동·배치하는 시스템이다. 계층적 강화학습 파이프라인, 통합 상호작용 구성표현(ICR), 객체 속도 추정기, 그리고 다목적 T‑AMP 플래너를 결합해 다중 물체를 긴 시간·거리 동안 충돌 없이 재배치한다. 실제 로봇 실험에서 40분 동안 32개의 의자를 8회 순환 이동시키는 데 성공하였다.
상세 분석
ALORE의 핵심은 “계층적 강화학습(HRL) 파이프라인”이다. 저수준에서는 전통적인 전신 제어(Whole‑Body Controller, WBC)를 사용해 로봇의 자세·보행 안정성을 보장하고, 고수준에서는 객체의 평면 속도를 목표로 하는 정책을 학습한다. 이때 고수준 정책은 객체‑로봇 상호작용을 그래프 형태로 표현한 ICR(Interaction Configuration Representation)을 입력으로 받는다. 그래프의 노드는 로봇 관절, 매니퓰레이터 엔드‑이펙터, 객체 중심점 등을 포함하고, 엣지는 접촉·구속 관계를 나타낸다. GNN 기반 메시지 패싱을 통해 다양한 물체(질량·마찰·형태가 상이)와의 상호작용을 하나의 네트워크가 일반화하도록 설계했다.
또한, 객체 속도 추정기(Object Velocity Estimator)는 proprioceptive 센서와 접촉력 정보를 융합해 실시간으로 객체의 2D 속도를 예측한다. 이 추정값은 고수준 정책의 피드백으로 사용돼, 목표 속도와 실제 속도 사이의 오차를 최소화한다. 이렇게 하면 물체가 미끄러지거나 회전하는 현상을 사전에 보정할 수 있다.
플래닝 측면에서는 T‑AMP(Task‑And‑Motion Planning) 프레임워크가 두 단계로 동작한다. 첫 단계는 “객체 방문 순서와 목표 위치 할당”을 최적화하는 combinatorial 문제로, 비용 함수는 전체 작업 시간(이동·조작·전환 시간)을 최소화한다. 두 번째 단계는 각 서브‑태스크에 대해 coarse‑to‑fine 트래젝터리를 생성한다. coarse 단계에서는 전역 경로를 빠르게 탐색하고, fine 단계에서는 WBC와 고수준 정책이 따라야 할 상세 궤적을 생성한다. 온라인 재계획 메커니즘이 포함돼, 예기치 않은 장애물이나 물체 미끄러짐이 발생하면 즉시 경로를 수정한다.
시뮬레이션에서는 다중 물체 환경을 구축해 10종 이상의 물체(의자, 테이블, 상자 등)를 동시에 학습시켰다. 기존 연구와 달리 단일 시뮬레이션에서 다양한 물체 데이터를 동시에 수집함으로써 정책이 “멀티‑오브젝트” 상황에서도 안정적으로 수렴한다. 실험 결과, ALORE는 기존 모델 기반 방법이 요구하는 정확한 물체 물성(질량·마찰) 정보를 필요로 하지 않으며, 동일한 정책으로 물체 종류와 환경이 바뀌어도 높은 속도 추적 정확도(RMSE < 0.05 m/s)를 유지한다.
시스템 통합 테스트에서는 40 m 길이의 복잡한 코스(좁은 통로, 울퉁불퉁한 지면, 다양한 바닥 재질)를 따라 의자를 끌고 가는 장면을 8회 연속 수행했으며, 전 과정에서 로봇 자체 충돌·물체 전도·보행 넘어짐이 전혀 발생하지 않았다. 이는 HRL 구조가 로봇의 동적 안정성을 보장하면서도 물체 제어에 집중할 수 있게 만든 결과이며, 실제 현장 적용 가능성을 크게 높인다.
한계점으로는 현재 평면(2D) 속도 제어에 초점을 맞추었기 때문에 물체의 회전·피치 제어가 제한적이며, 복잡한 비선형 접촉 모델을 완전히 학습하기 위해서는 더 많은 시뮬레이션 데이터와 실제 환경에서의 도메인 적응이 필요하다. 또한, 현재는 매니퓰레이터가 고정된 그리퍼 형태를 사용하므로, 다양한 그리퍼·툴 교체에 대한 연구가 추가로 요구된다.
전반적으로 ALORE는 “다리형 로봇 + 매니퓰레이터”라는 하드웨어 조합에 맞춘 통합 소프트웨어 스택을 제공함으로써, 대형 물체 재배치라는 실용적이면서도 고난이도 과제를 실시간, 장기, 자율적으로 해결할 수 있는 새로운 패러다임을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기