해부학 맞춤형 가이드와이어 형상 로봇
초록
**
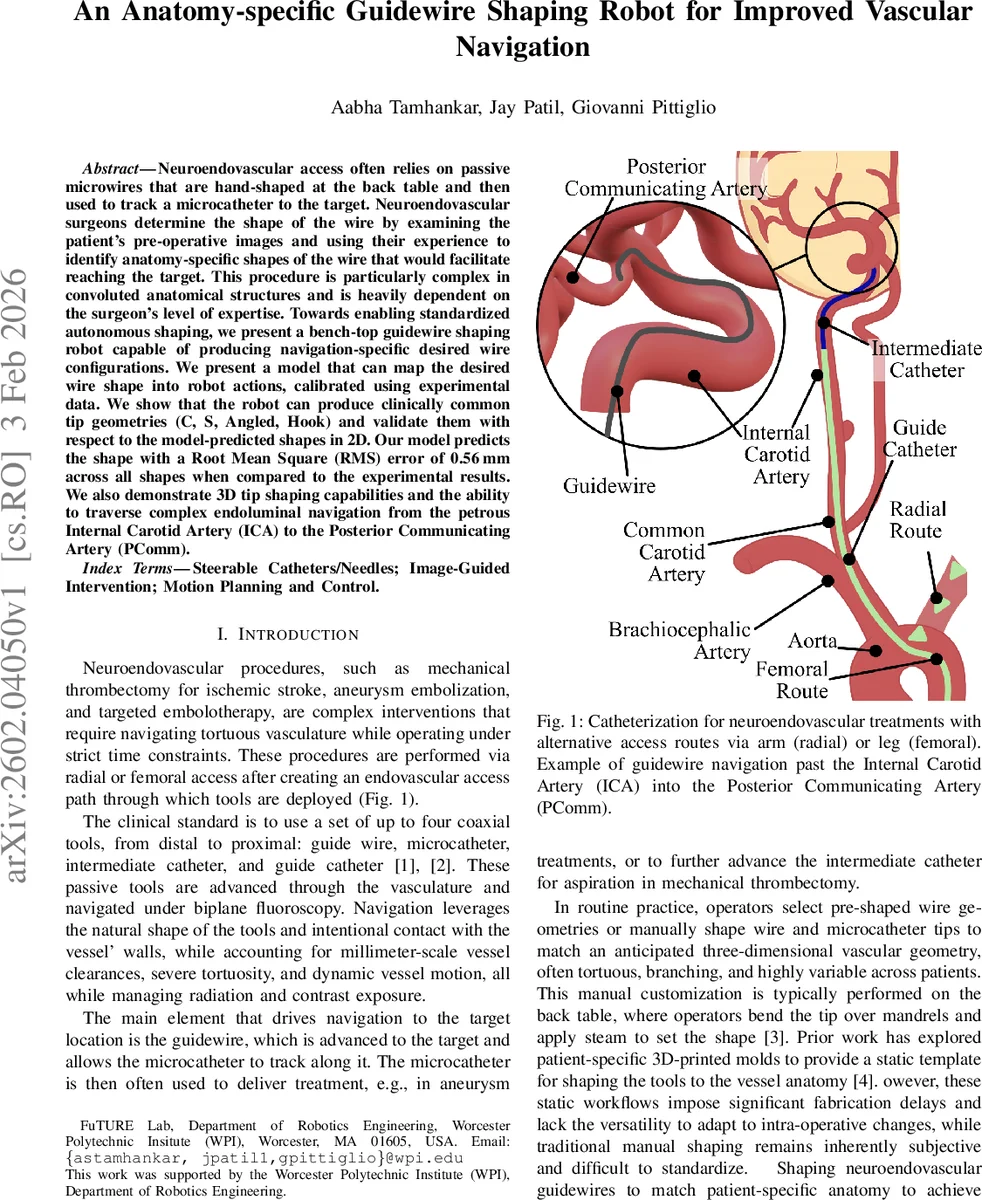
본 논문은 신경혈관 시술에서 사용되는 마이크로가이드와이어를 자동으로 원하는 형태로 가공할 수 있는 벤치톱 로봇을 제안한다. 로봇은 축방향 삽입·회전·구간별 굽힘이라는 세 가지 기본 동작을 조합해 C, S, 각진, 후크 등 임상에서 흔히 쓰이는 2D·3D 팁 형상을 재현한다. 실험을 통해 로봇이 예측한 형상과 실제 형상의 RMS 오차가 0.56 mm임을 확인했으며, 복잡한 해부학적 경로(예: petrous ICA → PComm)에서도 성공적으로 탐색할 수 있음을 보여준다.
**
상세 분석
**
이 연구는 기존 신경내과 시술에서 가이드와이어를 수작업으로 형태를 잡는 과정이 고도의 숙련도와 경험에 의존한다는 문제점을 인식하고, 이를 로봇 기반 자동화로 전환하려는 시도이다. 로봇 설계는 크게 세 부분으로 나뉜다. 첫 번째는 축방향 회전과 이송을 담당하는 ‘Drive Nozzle’이며, 마이크로 서보가 와이어를 잡아 순수한 회전 운동을 전달한다. 두 번째는 와이어의 축방향 움직임 중 미끄러짐을 방지하고 굽힘 구간을 고정하는 ‘Stabilizer’이다. 세 번째는 구간별 굽힘을 구현하는 ‘Shaping Carriage’로, 두 개의 맞춤형 조가운을 이용해 와이어를 핀치(pinch)하고 일정 거리만큼 전진시켜 국부적인 굽힘 모멘트를 가한다. 이때 굽힘 각도 θₖ는 조가운의 폐쇄 각도 βₖ와 전진 거리 δₖ에 의해 결정된다.
수학적 모델링에서는 와이어 중심선 p(s)를 연속적인 아크 길이 l을 갖는 n개의 구간으로 이산화하고, 각 구간을 일정한 곡률(θₖ)로 근사한다. 회전 각 ϕₖ는 전역 좌표계에서 굽힘 평면을 정의하고, 굽힘 각 θₖ는 재료 비선형성 및 그리퍼 압력에 크게 영향을 받는다. 따라서 저자들은 물리적 파라미터만으로 θₖ를 정확히 예측하기 어려움을 인정하고, 실험적 캘리브레이션을 통해 ‘특성 굽힘 각’ θ를 추정한다. 캘리브레이션 절차는 동일한 핀치 힘으로 10구간 연속 굽힘을 수행하고, 최종 �ord 길이 C̄를 측정해 식 (6)으로부터 θ를 역산한다. 이 단일 파라미터만으로도 복잡한 3D 형태(헬릭스, 다중 평면 S형 등)를 정확히 재현할 수 있음을 실험적으로 검증하였다.
실험 결과는 두드러진 두 가지 의미를 가진다. 첫째, RMS 오차 0.56 mm은 임상에서 허용 가능한 수준이며, 기존 수작업 방식보다 일관된 재현성을 제공한다. 둘째, 로봇이 생성한 팁 형태를 실제 혈관 모델(예: petrous ICA → PComm)에서 테스트했을 때, 목표 경로를 성공적으로 통과함으로써 형태 설계와 실제 내강 탐색 사이의 연계가 가능함을 입증한다. 또한, 로봇은 상용 가이드와이어(ARROW™ Marked Spring)를 그대로 사용하므로 기존 공급망을 교체할 필요가 없으며, 향후 환자별 이미지 기반 플래닝과 결합해 완전 자동화된 시술 워크플로우로 확장될 수 있다.
이 논문의 한계로는 현재 실험이 벤치톱 환경과 인공 혈관 모델에 국한되어 있어, 실제 임상 환경에서의 방사선 노출, 혈관 탄성, 혈류 동역학 등을 고려한 검증이 필요하다. 또한, 로봇의 정밀도는 기구적 마찰과 서보 토크에 의존하므로 장기 사용 시 마모와 보정 필요성이 존재한다. 향후 연구에서는 실시간 이미지 피드백을 통한 동적 재형성, 다양한 와이어 직경·재질에 대한 범용 캘리브레이션, 그리고 수술실 내 통합 인터페이스 개발이 요구된다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기