힘 분포를 이용한 선형 접촉 모델로 로봇 조작 효율 향상
초록
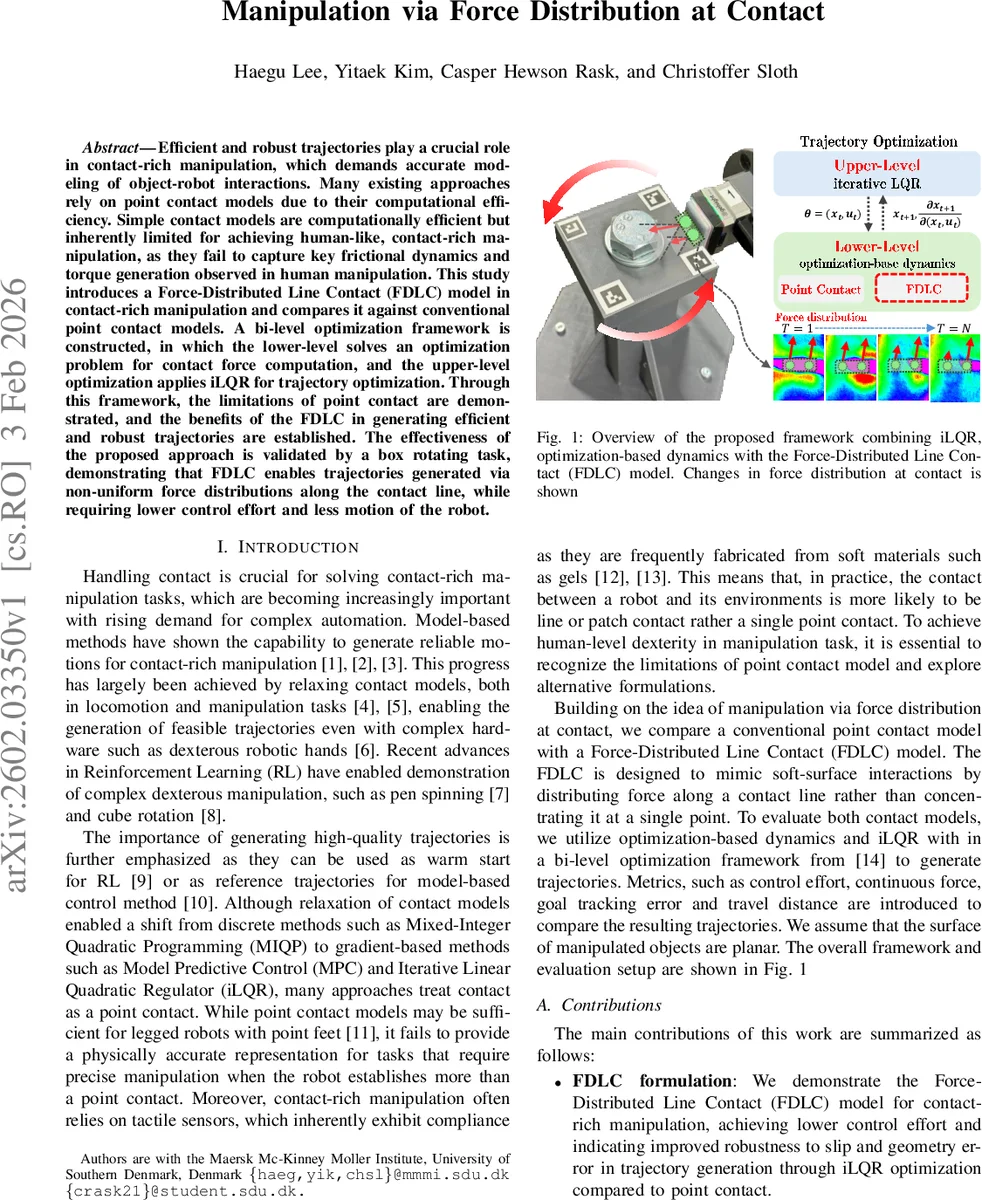
본 논문은 전통적인 점 접촉 모델의 한계를 지적하고, 두 점을 가상 스프링‑댐퍼로 연결해 힘을 비균등하게 분배하는 Force‑Distributed Line Contact(FDLC) 모델을 제안한다. 상위 레벨에서는 iLQR 기반 궤적 최적화를, 하위 레벨에서는 접촉 힘을 최적화하는 이중 최적화 구조를 구축하였다. 시뮬레이션 및 실제 로봇 실험을 통해 박스 회전 과제에서 FDLC가 제어 노력, 로봇 이동 거리, 접촉 지속력 측면에서 점 접촉보다 월등히 효율적이며 강인함을 보임을 입증한다.
상세 분석
본 연구는 접촉‑풍부(manipulation‑rich) 로봇 작업에서 “힘의 분포”가 궤적 효율성에 미치는 영향을 정량적으로 분석한다. 기존의 점 접촉(point contact) 모델은 계산량이 적어 실시간 제어에 유리하지만, 접촉면이 실제는 연성 물질이나 패치 형태인 경우 토크 생성 메커니즘을 제대로 포착하지 못한다. 저자는 두 점을 가상 스프링‑댐퍼(k, c, L)로 연결함으로써 선형 접촉(line contact)을 근사하고, 각 점이 독립적인 접촉력을 발휘하도록 설계하였다. 이 구조는 접촉면 전체에 걸친 비균등한 힘 배분을 가능하게 하여, 접촉점 자체의 이동 없이도 물체에 직접적인 회전 토크를 가할 수 있다.
이러한 FDLC를 기존 점 접촉과 비교하기 위해, 저자는 bi‑level 최적화 프레임워크를 채택한다. 하위 레벨에서는 접촉력과 마찰 조건을 포함한 제약식으로 정의된 최적화 문제를 풀어 다음 상태 xₜ₊₁을 얻고, 그 최적조건의 야코비안을 암시적 함수정리(implicit‑function theorem)로 미분해 상위 레벨 iLQR에 전달한다. 상위 레벨은 상태 x와 제어 u에 대한 비용 J=∑(xᵀQx+uᵀRu)+w·ϕ(x)²를 최소화하면서, 물체와 로봇 사이의 거리(ϕ)도 동시에 제어한다.
시뮬레이션에서는 박스를 회전시키는 과제를 설정하고, 목표 각도 θ_goal을 10°, 20°, 30°, 40°로 변형시켰다. 동일한 물리 파라미터(마찰계수 μₚ=0.5, μₛ=1.0 등)를 사용해 두 모델을 비교했으며, FDLC는 초기 큰 입력 후 빠르게 감소하는 제어 프로파일을 보였다. 반면 점 접촉은 슬라이딩을 통해 레버암을 만들기 때문에 전체 시간 동안 지속적인 입력이 필요했다. 결과적으로 FDLC는 누적 제어 노력과 로봇 이동 거리가 모두 20‑30% 정도 감소했으며, 접촉력이 목표 각도에 도달할 때까지 지속되어 로봇‑물체 간의 접촉 안정성이 향상되었다.
실험적 검증에서도 동일한 경향이 재현되었으며, 특히 물체 표면의 기하학적 오차나 마찰 변동에 대해 FDLC가 더 큰 여유를 제공한다는 점이 강조된다. 이는 가상 스프링‑댐퍼가 접촉면의 변형을 내재적으로 모델링함으로써, 접촉 모드 전이(예: 고정‑슬라이딩)를 명시적으로 정의하지 않아도 최적화 과정에서 자연스럽게 처리되기 때문이다.
핵심 인사이트는 다음과 같다. 첫째, 접촉면을 선형으로 모델링하고 힘을 비균등하게 배분하면 토크 생성 효율이 크게 향상된다. 둘째, bi‑level 구조와 iLQR의 결합은 복잡한 접촉 제약을 포함하면서도 그래디언트 기반 최적화를 가능하게 하여 실시간 적용 가능성을 확보한다. 셋째, FDLC는 로봇의 이동량을 줄여 에너지 소비와 마모를 감소시키며, 접촉 지속성을 통해 외란에 대한 강인성을 제공한다. 이러한 장점은 특히 연성 센서가 부착된 로봇 손이나, 인간‑로봇 협업 상황에서 인간과 유사한 섬세한 조작을 구현하고자 할 때 유용하다.
댓글 및 학술 토론
Loading comments...
의견 남기기