시퀀스 일관성을 활용한 차세대 라이다 재위치 추정
초록
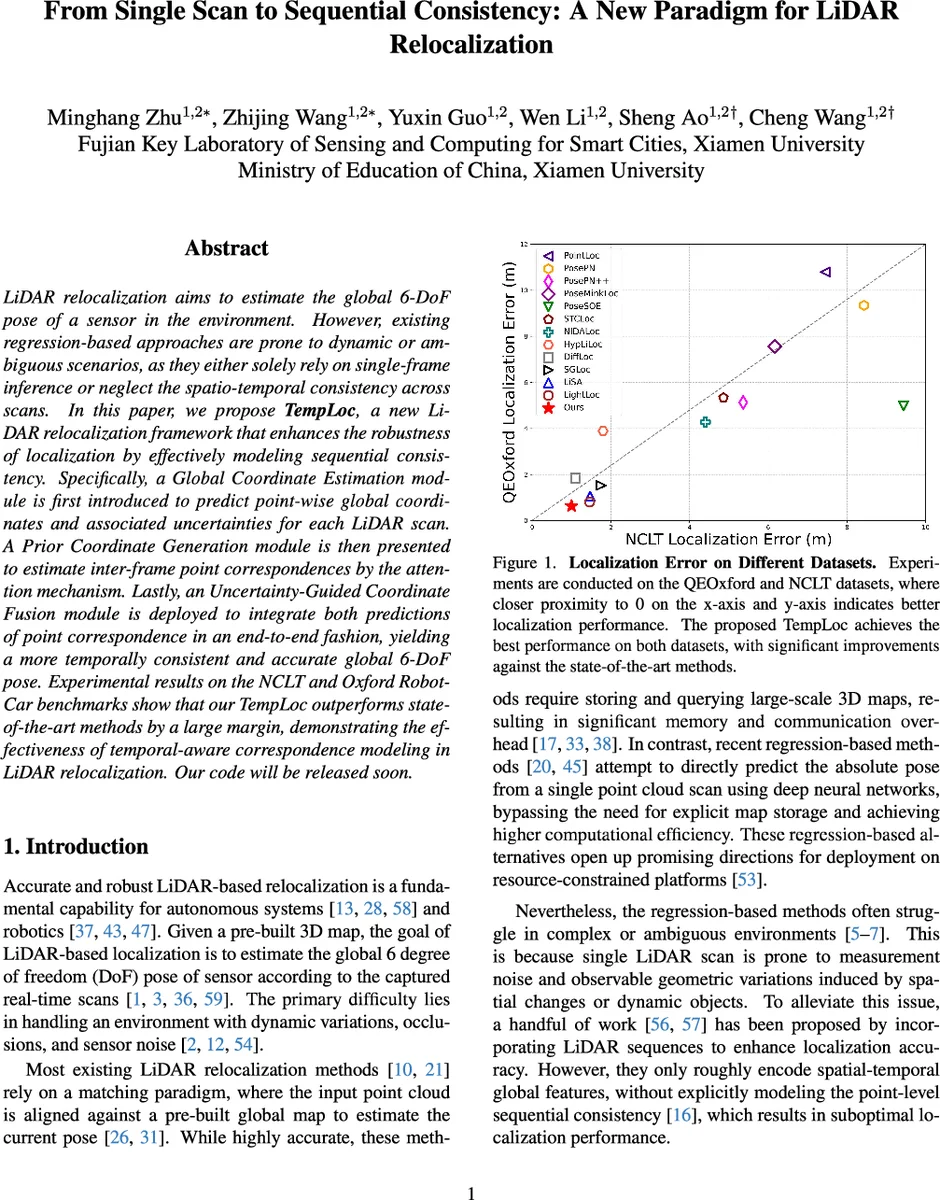
TempLoc은 라이다 스캔의 전역 좌표와 불확실성을 예측하고, 인접 프레임 간의 점 대응을 주의 메커니즘으로 추정한 뒤, 불확실성 기반 융합을 통해 시계열 일관성을 강화한다. 최종 6‑DoF 자세는 정교화된 3‑D‑3‑D 대응을 RANSAC에 입력해 얻으며, NCLT와 Oxford RobotCar에서 기존 방법들을 크게 앞선 성능을 보인다.
상세 분석
본 논문은 라이다 기반 재위치 문제를 “단일 프레임 회귀”와 “시퀀스 일관성 부재”라는 두 가지 근본적 한계에 초점을 맞춘다. 기존 회귀 기반 APR(Absolute Pose Regression)과 SCR(Scene Coordinate Regression) 방식은 각각 전역 자세를 직접 예측하거나 점별 전역 좌표를 회귀하지만, 잡음·동적 객체·구조적 부족 상황에서 다수의 아웃라이어를 생성한다. TempLoc은 이러한 문제를 해결하기 위해 세 가지 모듈을 순차적으로 결합한다.
-
Global Coordinate Estimation (GCE): LightLoc 기반 SCR 네트워크에 공유 MLP를 추가해 각 점의 전역 좌표와 함께 불확실성 스코어 (u_i)를 동시에 출력한다. 불확실성 라벨은 실제 좌표와의 L1 거리와 동적 임계값 (\tau) 비교로 정의되며, 학습 초기에는 관측 오차가 큰 점들을 ‘신뢰도 높음’으로 간주해 학습 안정성을 확보한다. 손실은 좌표 회귀 MSE와 불확실성 이진 교차 손실을 가중합한 형태이며, 이는 모델이 정확한 좌표와 신뢰도 모두를 동시에 학습하도록 유도한다.
-
Prior Coordinate Generation (PCG): 인접 프레임 간의 점 대응을 추정하기 위해 PCAM(점 클라우드 어텐션 매칭) 네트워크에 자체‑어텐션을 삽입한다. 각 프레임 (P^{t-1})와 (P^{t})에 대해 전역 어텐션 행렬 (A_{global})을 계산하고, 이를 통해 소프트 대응 (m(p_i^{t-1}))를 얻는다. 소프트 대응은 실제 점이 아니므로, k‑최근접 이웃 보간을 사용해 현재 프레임의 실제 점 (p_j^{t})에 가장 가까운 k 개의 소프트 대응을 찾아 가중 평균함으로써 ‘사전 좌표’ (p^{prior}_j)와 그 불확실성 (u^{prior}_j)를 생성한다. 이 단계는 시계열 흐름을 명시적으로 모델링함으로써 단일 프레임에서 발생하는 모호성을 크게 감소시킨다.
-
Uncertainty‑Guided Coordinate Fusion (UCF): GCE에서 얻은 측정 좌표 (p^{meas})와 PCG에서 얻은 사전 좌표 (p^{prior})를 각각의 불확실성 스코어를 입력으로 Softmax 가중치를 학습한다. 가중치 (w^{prior}, w^{meas})는 데이터에 따라 자동 조정되며, 최종 융합 좌표는
\
댓글 및 학술 토론
Loading comments...
의견 남기기