배려하는 몸짓 AI: 다중 현장 의료 로봇 공동 설계와 고충실도 프로토타입
초록
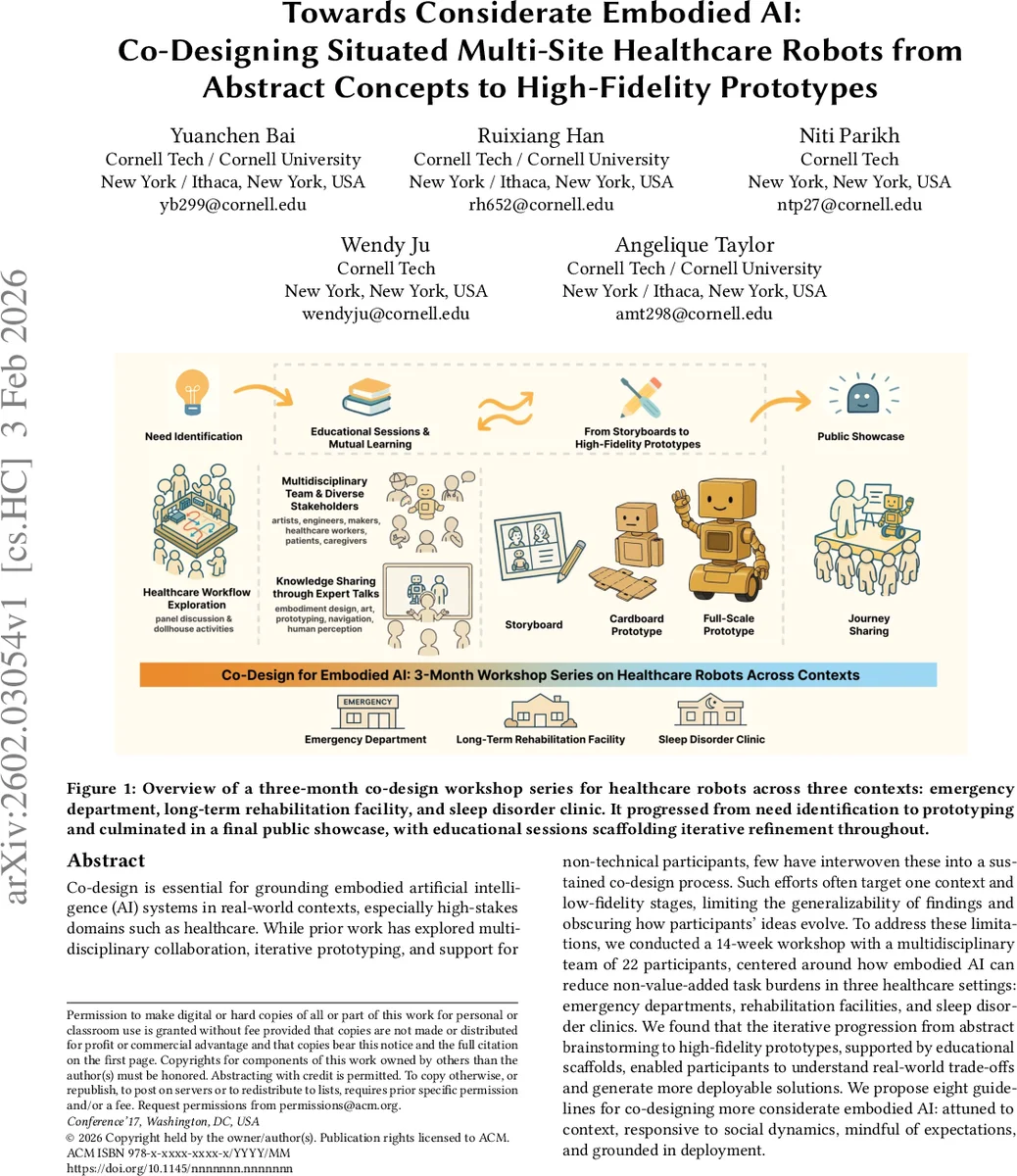
본 연구는 응급실, 장기 재활 시설, 수면 장애 클리닉 등 세 가지 의료 현장에서 비가치 작업(NVA)을 경감할 로봇을 설계하기 위해 14주간 22명의 다학제 팀과 공동 설계 워크숍을 진행했다. 추상 아이디어 단계에서 고충실도 물리 프로토타입까지 반복적인 아이디어 구체화와 교육 스캐폴딩을 제공함으로써 참가자들의 현실 인식과 실현 가능성을 높였으며, 여덟 가지 설계 지침을 도출하였다.
상세 분석
이 논문은 기존 의료 로봇 공동 설계 연구가 단일 현장·저충실도 단계에 머물렀던 한계를 극복하고, 다중 현장·고충실도 프로토타입까지 아우르는 지속적 협업 프로세스를 제시한다는 점에서 학술적·실무적 의의가 크다. 첫째, 연구팀은 응급실(ED), 장기 재활(LTR), 수면 장애 클리닉(SDC)이라는 서로 다른 작업 흐름·공간·사회적 요구를 가진 세 현장을 동시에 탐색함으로써 ‘맥락 의존적 로봇 역할’이라는 개념을 구체화한다. 각 현장별 NVA 작업(예: 불필요한 이동, 서류 작업, 중복 커뮤니케이션)을 체계적으로 도출하고, 이를 로봇이 담당할 수 있는 기능(물류 전달, 환자 모니터링, 감정 지원 등)과 연결시켰다.
둘째, 14주에 걸친 3시간씩의 워크숍은 ‘필요 식별 → 워크플로우 매핑 → 스토리보드 → 카드보드 → 전동식 고충실도 프로토타입’ 순으로 진행되었으며, 각 단계마다 교육 스캐폴딩(기술 데모, 로봇 아키텍처 강의, 윤리·프라이버시 토론 등)을 삽입해 비전문가도 설계 논의에 적극 참여하도록 설계했다. 특히, 고충실도 프로토형 제작을 통해 공간 제약, 내비게이션 충돌, 인간-로봇 근접성 등 실제 현장에서 드러나는 제약을 조기에 발견하고 해결책을 모색할 수 있었다.
셋째, 다학제 참여(의료 종사자, 엔지니어, 디자이너, 예술가 등)와 지속적 협업을 통해 ‘공동 의미 형성(co‑construction of meaning)’이 이루어졌다. 참가자들은 초기 아이디어 단계에서 서로의 전문 용어와 관점을 번역하며 이해의 격차를 좁혔고, 중간 단계에서는 역할 갈등과 기대 차이를 조정하기 위한 토론을 진행했다. 이러한 과정은 설계 결과물의 수용 가능성을 크게 높였다.
넷째, 연구는 8가지 설계 지침을 제시한다. (1) 맥락에 민감할 것, (2) 사회적 동역학에 대응할 것, (3) 기대를 명확히 할 것, (4) 배포 가능성을 고려할 것, (5) 기술 문해력 향상을 위한 교육, (6) 물리·시간·공간 제약을 명시할 것, (7) 다중 현장 학습을 촉진할 것, (8) 윤리·프라이버시를 설계에 내재할 것. 이 지침들은 기존 ‘정적 사회 로봇’ 지침을 넘어, 동적인 의료 현장에 특화된 고려사항을 제공한다.
마지막으로, 논문은 고충실도 프로토타입이 단순 시각적 완성도가 아니라, 실제 배포 전 ‘디자인 검증 도구’로서의 역할을 수행한다는 점을 강조한다. 이는 향후 의료 로봇 연구가 초기 아이디어 단계에서 바로 실험적 구현으로 전이될 수 있는 새로운 워크플로우 모델을 제시한다는 점에서 혁신적이다.
댓글 및 학술 토론
Loading comments...
의견 남기기