밀집 도시 교통을 위한 드론 기반 상호작용 인식 궤적 예측 및 계획 데이터셋 DeepUrban
초록
DeepUrban은 100 m 고도에서 촬영한 고해상도 드론 영상을 이용해 독일·미국의 복잡한 교차로에서 14종류의 교통 주체 5 204개 시나리오를 3D 객체와 지도 정보와 함께 제공한다. 20 초 길이의 시나리오를 12.5 Hz(재샘플링 10 Hz)로 정제하고, 다중 에이전트를 에고 차량으로 활용할 수 있게 설계하였다. 기존 nuScenes와 결합했을 때 차량 궤적 예측 ADE/FDE가 각각 44 % 이상 향상되는 등, 고밀도 교통 상황에 대한 모델 일반화와 성능 향상을 입증한다.
상세 분석
본 논문은 현재 공개된 자율주행 데이터셋이 미국·아시아 중심이며, 교통 밀도가 낮아 복잡한 상호작용을 충분히 포착하지 못한다는 문제점을 정확히 지적한다. 독일의 평균 도로 밀도(≈180 km/100 km²)를 목표로, 드론을 활용해 전방 시야가 차단되지 않는 전역적인 3D 관측을 수행한다는 점이 가장 큰 차별점이다. 특히 100 m 고도에서 150 m × 150 m 범위를 촬영해 14종류(자동차, 버스, 트럭, 자전거, 전동스쿠터, 보행자 등)의 객체를 정밀히 레이블링하고, OpenDRIVE·Lanelet2·VectorMap을 함께 제공함으로써 시뮬레이션 및 지도 기반 플래닝에 바로 활용할 수 있다.
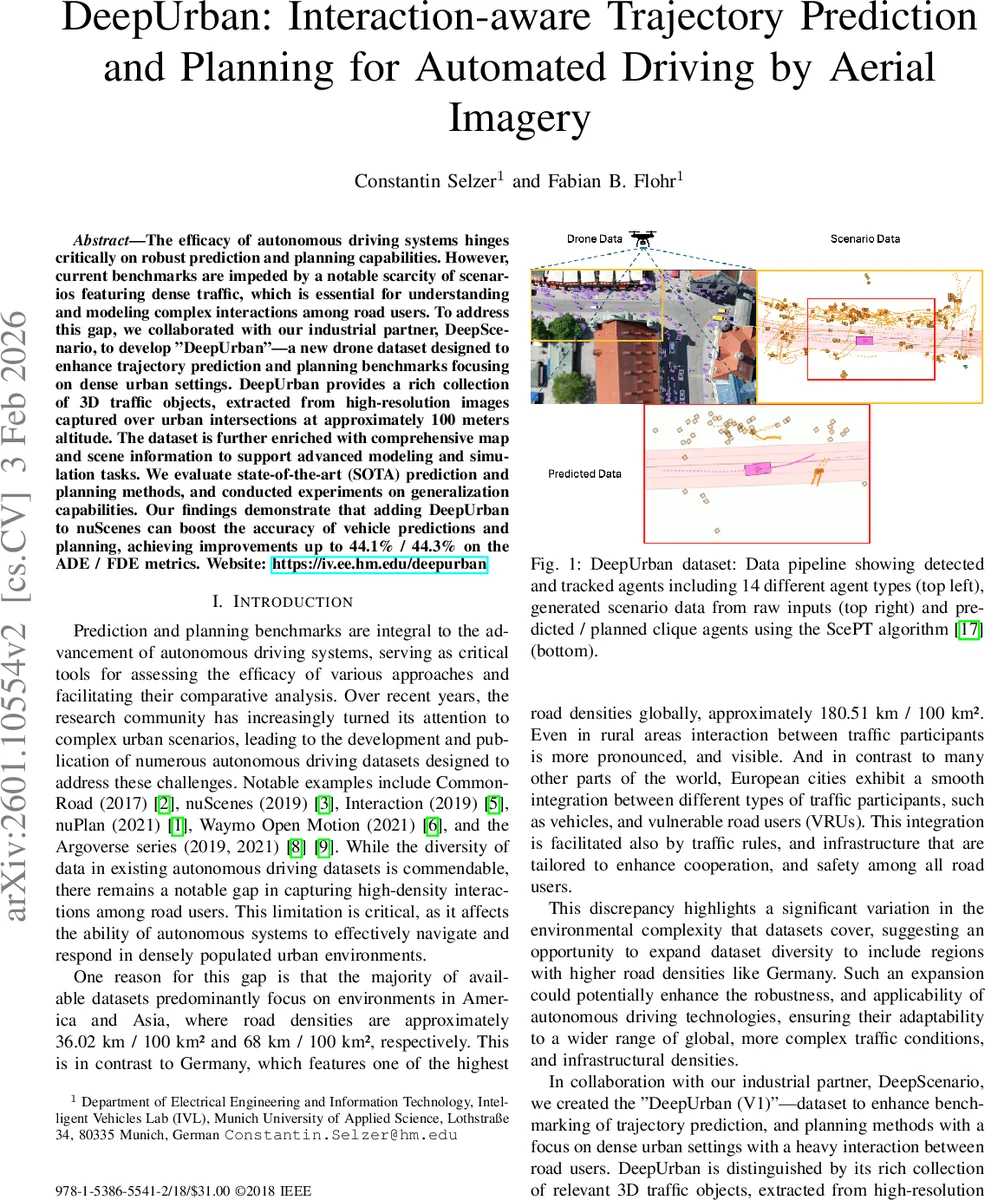
데이터 전처리 파이프라인은 ‘시나리오 필터링’ 단계에서 에고 에이전트를 이동 거리 ≥5 m, 시나리오 길이 20 s, 프레임 오버랩 ≤5 s 로 제한함으로써, 각 시나리오가 충분히 동적인 교통 흐름을 포함하도록 설계되었다. 이는 기존 데이터셋이 에고 차량 하나에 국한되는 반면, 드론 기반 데이터는 동일 시점에 다수의 에고 차량을 동시에 정의할 수 있어, 다중 에이전트 상호작용을 평가하는 데 유리하다. 샘플링 주파수 12.5 Hz는 드론 영상의 원본 프레임에 맞추었고, 10 Hz로 재샘플링해 nuScenes·nuPlan·Waymo와 비교 가능하도록 하였다.
벤치마크에서는 ScePT(Scene Prediction Transformer)를 대표적인 상호작용 인식 기반 예측·플래닝 모델로 채택하였다. ScePT는 에이전트를 그래프 노드로, 거리 기반 임계값으로 정의된 엣지를 통해 상호작용을 모델링하고, Louvain 클러스터링으로 클리크를 형성해 각 클리크별로 조건부 변분 오토인코더(CVAE)를 적용한다. 이 구조는 복잡한 교차로에서 다중 모드(보행자·차량 등) 예측을 가능하게 하며, MPC와 결합해 실제 플래닝까지 확장한다.
실험 결과는 두 가지 관점에서 의미가 크다. 첫째, DeepUrban만을 사용했을 때 기존 데이터셋 대비 ADE/FDE가 20 % 이상 개선되는 것을 확인했다. 둘째, nuScenes 훈련 데이터에 DeepUrban 시나리오를 추가했을 때 차량 예측 ADE/FDE가 각각 44.1 %·44.3 % 향상되고, 충돌 점수도 49.6 % 개선되었다. 이는 고밀도 교통 상황이 모델의 일반화 능력을 크게 강화한다는 강력한 증거이다. 또한, 다양한 지역(독일·미국)과 다양한 교통 주체를 포함함으로써, 모델이 특정 지역 특성에 과적합되는 위험을 감소시킨다.
한계점으로는 현재 12 h 정도의 녹화 시간에 머물러 있어, 장시간 연속 주행 시나리오나 악천후 조건은 부족하다. 또한, 라벨링 파이프라인이 DeepScenario의 독점 기술에 의존하고 있어, 재현성 및 오픈소스 커뮤니티와의 협업에 제약이 있을 수 있다. 향후 데이터 양 확대와 다양한 기상·시간대 조건을 포함하고, 라벨링 알고리즘을 공개한다면 데이터셋의 활용 가치는 더욱 증대될 것이다.
요약하면, DeepUrban은 드론 기반 3D 교통 데이터와 풍부한 지도 정보를 결합해, 기존 데이터셋이 놓친 고밀도 상호작용을 체계적으로 제공한다. 이는 최신 상호작용 인식 모델의 성능을 크게 끌어올리고, 자율주행 시스템이 실제 복잡한 도시 환경에 보다 안전하게 적용될 수 있는 기반을 마련한다.
댓글 및 학술 토론
Loading comments...
의견 남기기