무대응 자유형 표면 제어를 위한 함수 기반 시뮬실 전이
초록
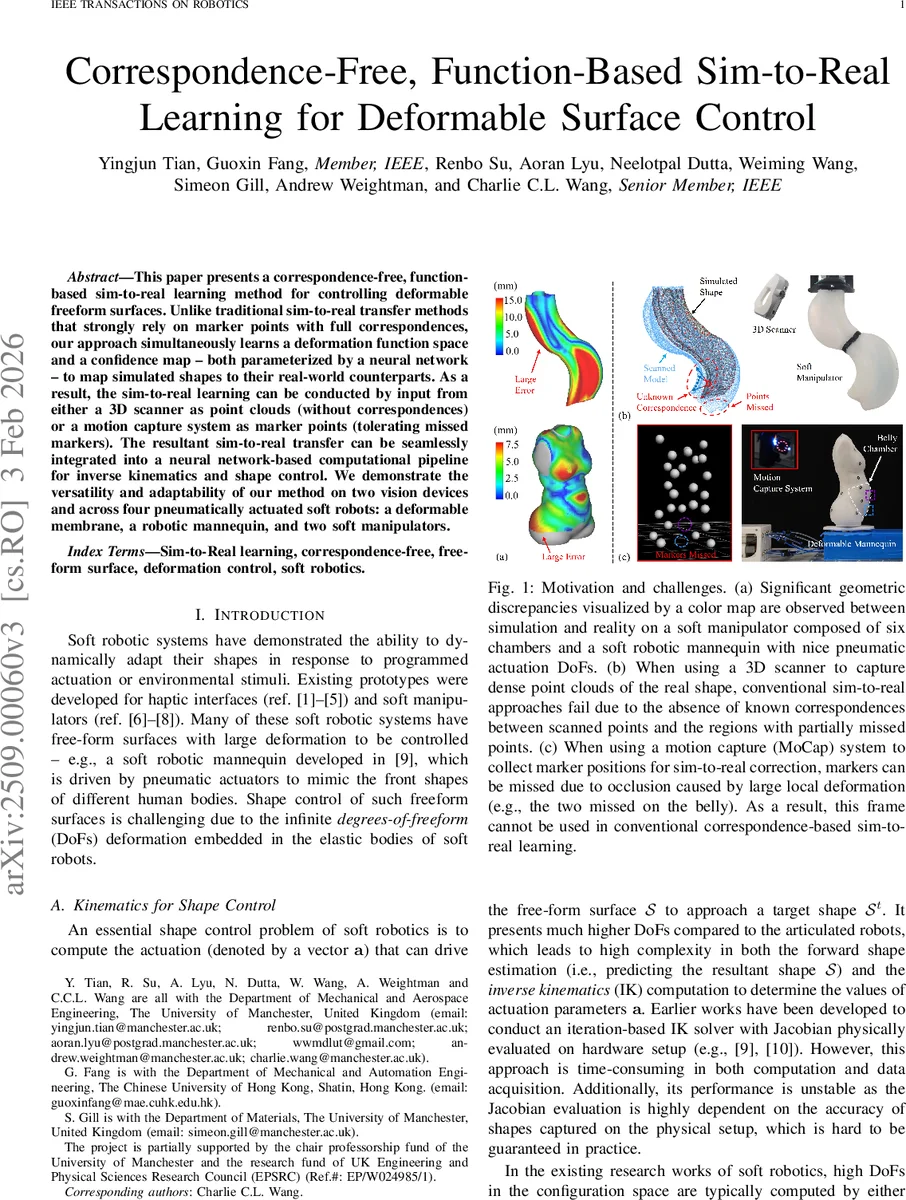
본 논문은 마커와 대응점이 없는 3D 스캔 혹은 부분적으로 누락된 MoCap 데이터에서도 시뮬레이션과 실제 변형을 정합시키는 함수 기반 시뮬‑실 전이 방법을 제안한다. B‑스플라인으로 압축된 형태 표현과 RBF 기반 공간 워핑 함수를 신경망으로 학습하고, 별도의 대응점 없이 가중치가 적용된 Chamfer 거리로 손실을 정의한다. 학습된 워핑 함수는 시뮬레이션 결과를 실세계 형태로 변환하고, 이를 이용해 역기구학(IK) 네트워크를 빠르게 구동한다. 네 종류의 공압 소프트 로봇(막, 마네킹, 두 매니퓰레이터)에서 실험을 수행해 정확도와 일반성을 입증하였다.
상세 분석
이 연구는 소프트 로봇의 자유형 표면 제어라는 고차원 비선형 문제에 ‘함수 공간’이라는 새로운 관점을 도입한다는 점에서 혁신적이다. 기존 시뮬‑실 전이 방식은 마커 기반 대응점이 전제되어, 3D 스캔과 같은 비정형 데이터에 적용하기 어려웠다. 저자들은 먼저 시뮬레이션에서 얻은 표면을 B‑스플라인으로 피팅해 제어점 집합 (S_c) 을 저차원 형태 디스크립터로 만든다. 이는 포인트 클라우드의 고차원성을 크게 감소시켜 신경망 입력으로 적합하게 만든다.
다음으로, 실제와 시뮬레이션 사이의 변형을 연속적인 공간 워핑 함수 (\Phi(p)) 로 모델링한다. 이 함수는 선형 변환 (A p + \alpha_0) 와 가우시안 RBF (\sum_i \beta_i \exp(-c|p-q_i|^2)) 의 합으로 정의되며, 커널 중심 (q_i) 는 B‑스플라인 표면 위의 UV 파라미터에 따라 고르게 샘플링된다. 핵심은 (\gamma =
댓글 및 학술 토론
Loading comments...
의견 남기기