신경 기호적 완화를 통한 빠른 작업 계획
초록
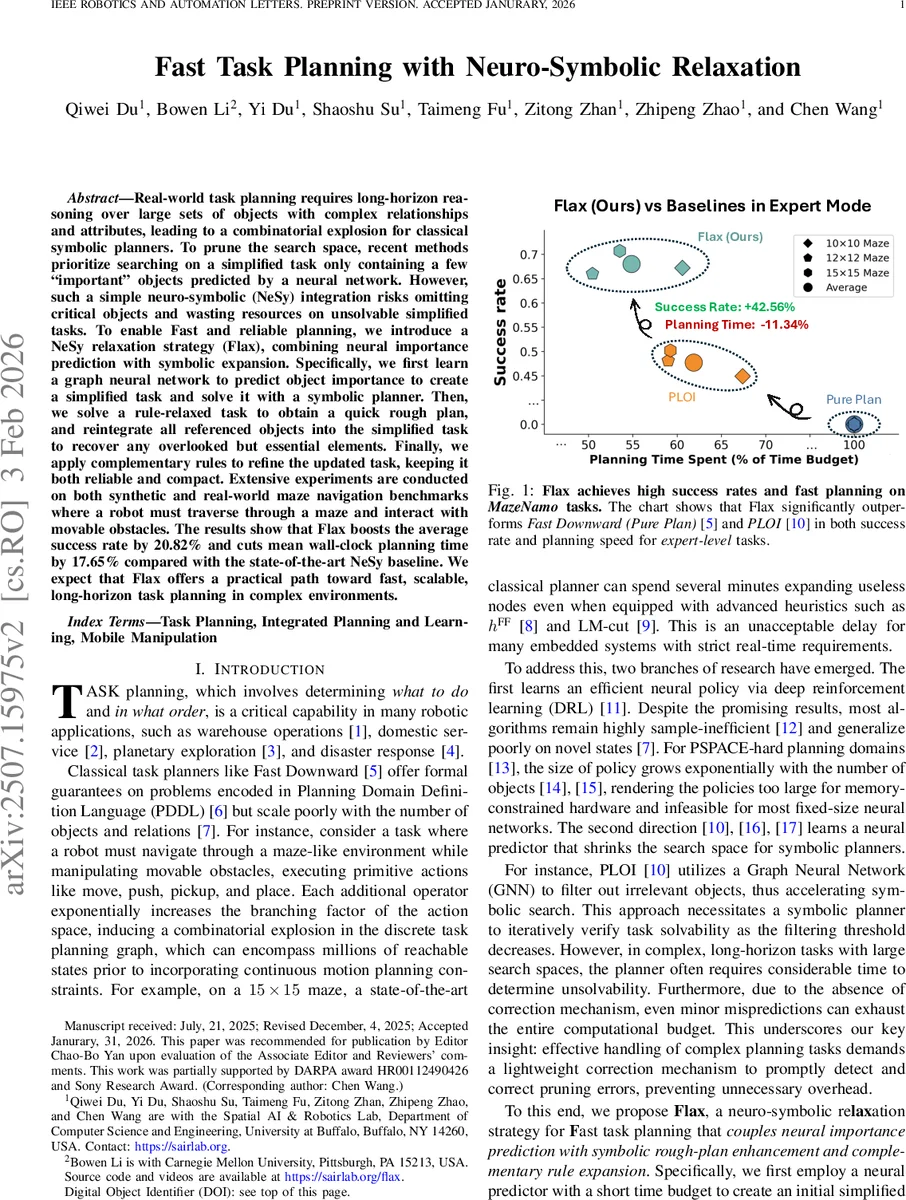
Flax는 그래프 신경망으로 객체 중요도를 예측해 작업을 축소하고, 규칙 기반 완화와 보완 규칙을 이용해 놓친 객체를 빠르게 복구한다. 이를 통해 복잡한 미로‑장애물 환경에서 성공률을 20 % 이상, 계획 시간은 17 % 이상 단축한다.
상세 분석
본 논문은 장기·고차원 로봇 작업 계획에서 발생하는 조합 폭발 문제를 해결하기 위해 ‘신경‑기호적 완화(NeSy relaxation)’라는 새로운 프레임워크를 제안한다. 핵심 아이디어는 세 단계로 구성된다. 첫 번째 단계에서는 그래프 신경망(GNN)을 이용해 현재 PDDL 문제에 등장하는 모든 객체에 중요도 점수를 부여한다. 이 점수는 최적 계획에 실제로 등장한 객체를 정답 라벨로 삼아 이진 교차 엔트로피 손실로 학습한다. 중요도 임계값 q를 조정하면서, 점수가 q 이상인 객체만을 남겨 축소된 서브문제 τ_O1을 만든다. 여기서 기존 방법(PLOI 등)은 임계값을 낮추며 반복 검증하지만, 복잡한 장면에서는 검증 자체가 시간 초과로 이어진다.
두 번째 단계에서는 ‘규칙 완화’를 적용한다. 전체 도메인에 정의된 완화 규칙(예: 장애물 이동 제한을 일시적으로 해제, 상하 관계 무시 등)을 사용해 원래 문제를 완화된 버전 τ_relaxed 으로 변환하고, 제한된 시간 Δt₂ 내에 빠른 ‘거친 계획’ μ_r 을 생성한다. 이 거친 계획에 등장한 모든 객체를 기존 중요도 집합 O1 에 병합해 O2 를 만든다. 완화 단계는 완전성을 보장하지 않지만, 중요한 객체를 빠르게 포착함으로써 초기 필터링 오류를 보정한다.
세 번째 단계는 ‘보완 규칙(complementary rules)’을 적용해 O2 를 다시 확장한다. 여기서는 예를 들어 ‘손에 들고 있는 물체는 반드시 주변에 비어 있는 공간이 필요하다’, ‘무거운 상자는 반드시 바닥에 놓여야 한다’와 같은 도메인 특화 제약을 재삽입한다. 이렇게 정제된 객체 집합 O3 는 원래 문제 τ 에 다시 적용되어 최종 계획 탐색이 수행된다.
실험은 MiniGrid 기반 MazeNamo 벤치마크(다양한 맵 크기·난이도), Isaac Sim 포크리프트‑창고 시뮬레이션, 실제 Unitree Go2 로봇 환경에서 진행되었다. 결과는 Flax가 기존 최첨단 신경‑기호적 방법(PLOI) 대비 평균 성공률을 20.82 % 향상시키고, 평균 계획 시간은 17.65 % 감소시켰음을 보여준다. 특히 ‘전문가 모드’에서 고난이도 15×15 미로에서 Fast Downward가 100 초 이상 걸리는 반면, Flax는 30 초 내외로 해결한다.
이 접근법의 장점은 (1) 신경망 기반 필터링의 속도와 (2) 기호적 완화·보완 규칙의 신뢰성을 결합해, 초기 필터링 오류를 빠르게 복구한다는 점이다. 또한, 완화 단계가 전역 최적성을 요구하지 않으므로 계산 비용이 낮으며, 보완 규칙이 도메인 별로 비교적 간단히 정의될 수 있다. 한계점으로는 도메인‑특화 완화·보완 규칙 설계에 인간 전문가의 개입이 필요하고, 완화 규칙이 과도하게 완화될 경우 거친 계획이 의미 없는 결과를 낼 위험이 있다. 향후 연구에서는 자동 규칙 학습 및 다중 도메인 일반화를 목표로 할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기