달용 모듈형 등변면 소프트 로봇 트러스 시스템
초록
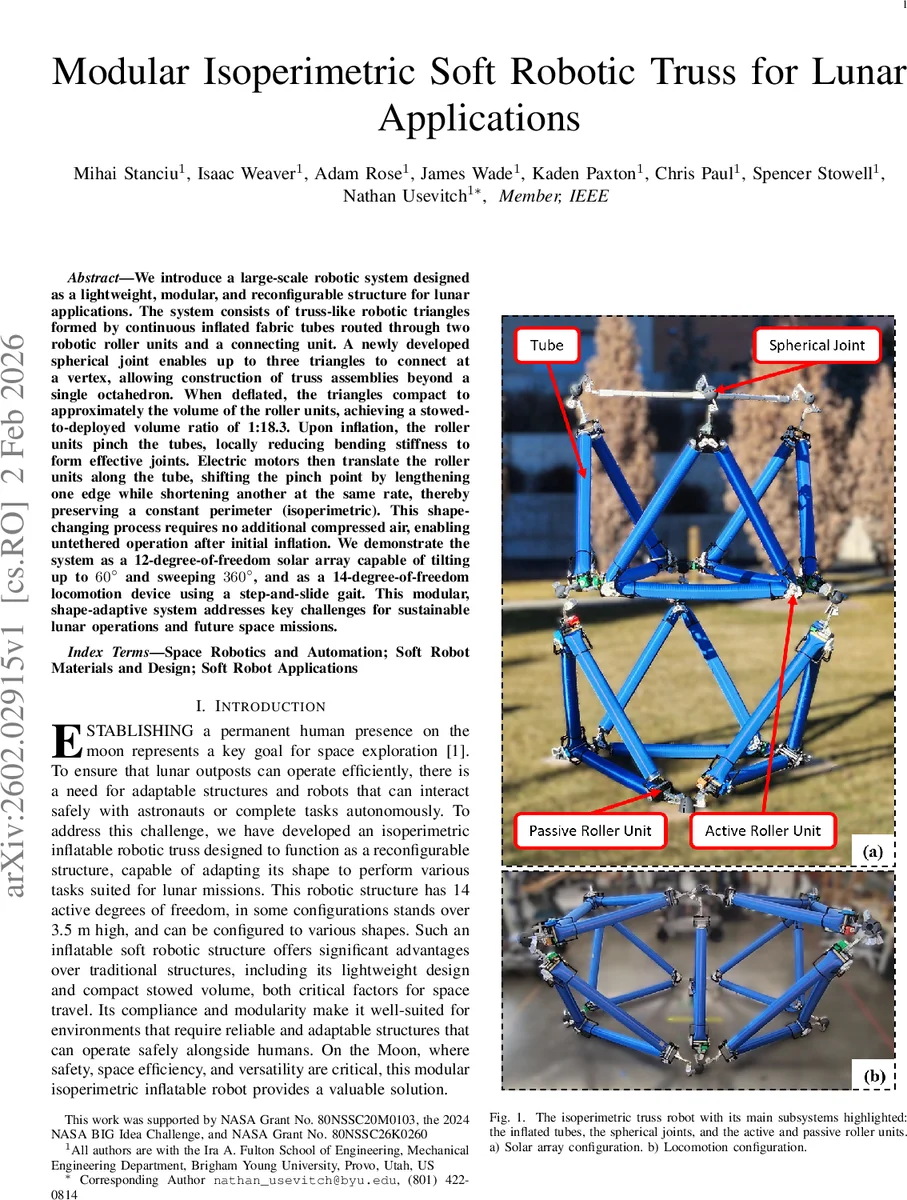
본 논문은 달 표면에서 경량·모듈·재구성이 가능한 소프트 로봇 트러스를 제안한다. 연속 팽창 패브릭 튜브와 두 개의 액티브 롤러 유닛, 하나의 패시브 유닛으로 이루어진 삼각형 구조를 구형 조인트로 연결해 다중 옥타헤드론을 형성한다. 롤러가 튜브를 핀치하면서 주변 길이를 변형시켜 주변 둘레를 일정하게 유지(isoperimetric)하고, 추가 압축 공기 없이 형태 변환이 가능하다. 12 DOF 태양 전지판 및 14 DOF 보행 로봇 시연을 통해 달 기지 구축·유지보수에 필요한 다목적 로봇 플랫폼으로서의 가능성을 입증한다.
상세 분석
이 연구는 기존의 강체 기반 가변형 트러스(VGT)와 달리, 내부 압력으로 팽창된 연성 튜브를 등변면(isoperimetric) 원리로 구동한다는 점에서 혁신적이다. 등변면 조건은 삼각형 각 변의 길이 변화가 동시에 일어나면서도 전체 둘레가 보존되도록 하여, 별도의 압축 공기 공급 없이도 형태 전환이 가능하게 만든다. 이를 위해 두 개의 액티브 롤러 유닛이 튜브를 핀치하고, 모터 구동으로 롤러를 직선 이동시켜 한 변을 늘리고 다른 변을 동일 비율로 줄이는 메커니즘을 구현하였다. 롤러 설계에서는 기존 설계보다 큰 갭과 샤프트 직경을 채택해 내부 압력을 41 kPa에서 120 kPa 이상으로 상승시켰으며, 기어 트레인의 복잡성을 감소시켜 신뢰성을 높였다. 또한 경량 POM·알루미늄·탄소강 부품을 활용해 액티브 유닛 무게를 31 %, 패시브 유닛을 38 % 경감시켰다.
구형 조인트는 기존 2개 연결 제한을 넘어 3개 이상을 한 정점에 결합할 수 있도록 설계되었으며, 가상의 회전 중심을 유지해 각 삼각형 사이의 자유도를 보존한다. 이는 스택형 옥타헤드론 구조를 구현하는 데 핵심적인 역할을 하며, 다중 트러스 어셈블리를 통한 확장성을 제공한다. 튜브는 나일론 외피와 폴리우레탄 내피를 갖는 상용 배관 호스를 사용해 3.65 m·100 mm·1.6 mm 규격으로 제작했으며, PLA 플러그와 고무 테이프·T‑볼트 클램프를 통해 기밀성을 확보하였다.
시연 결과, 12 DOF 태양 전지판은 60° 기울기와 360° 회전이 가능했으며, 14 DOF 보행 로봇은 스텝‑앤‑슬라이드 보행으로 안정적인 이동을 보여주었다. 이러한 다목적성은 달 기지에서 전력 공급, 구조 재배치, 장애물 회피 등 다양한 임무를 하나의 플랫폼으로 수행할 수 있게 한다. 그러나 현재는 내부 압력 유지와 장시간 무인 운용을 위한 에너지 관리, 진동·충격에 대한 내구성 평가가 부족하며, 실제 달 환경(극저온·진공·미세먼지)에서의 시험이 필요하다. 향후 연구에서는 고압·저온에 강한 소재 개발, 자가 진단·복구 메커니즘, 그리고 자동 전개·재구성 알고리즘을 통합해 완전 무인 달 로봇 시스템으로 발전시킬 여지가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기