멀티판다 ROS2로 실시간 다중 로봇 제어와 시뮬실제 격차 해소
초록
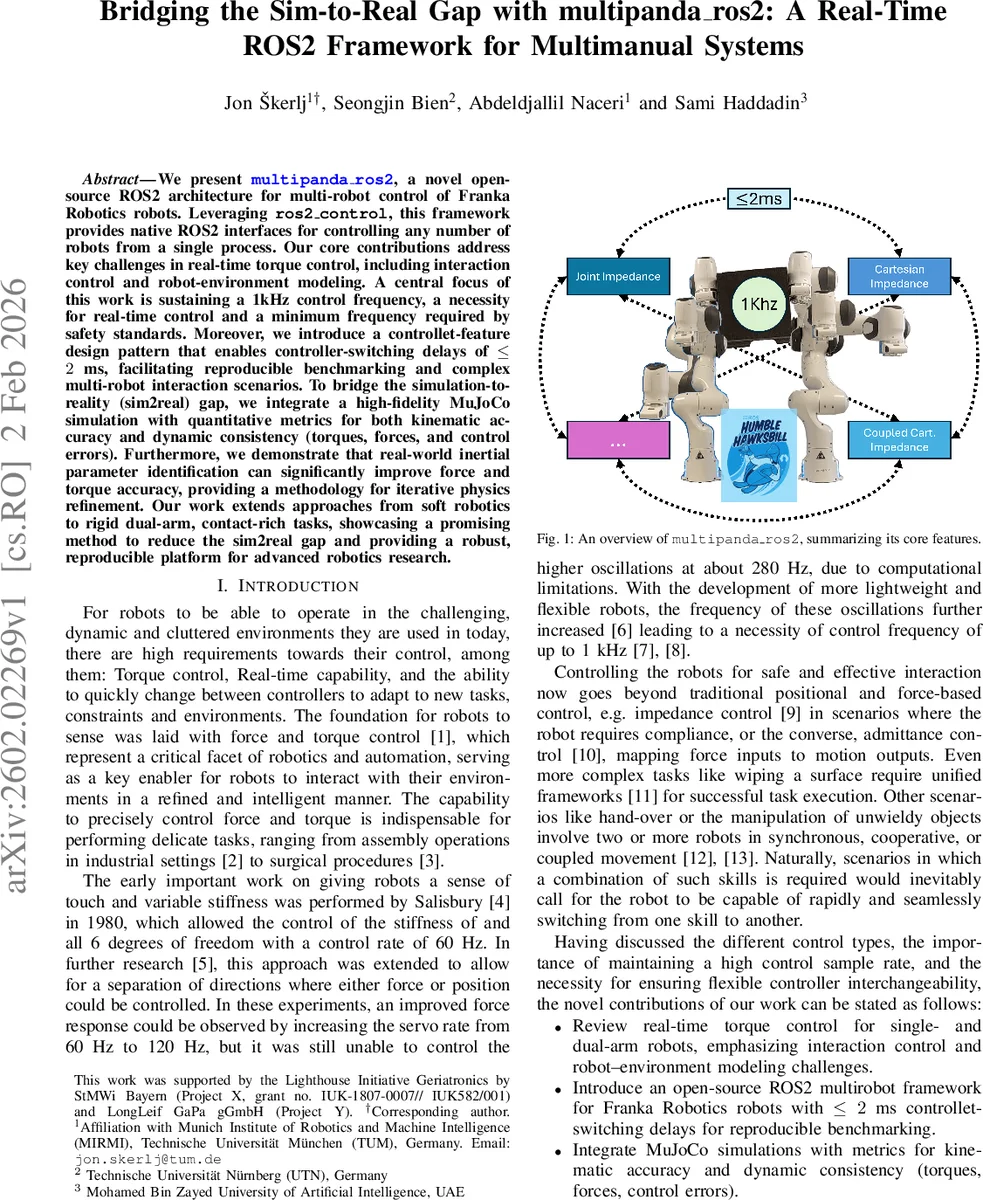
본 논문은 Franka Emika Panda 로봇을 다수 동시에 제어할 수 있는 오픈소스 ROS 2 기반 프레임워크 multipanda_ros2를 소개한다. ros2_control 위에 구축된 멀티모드 컨트롤러와 ‘controllet’ 설계 패턴을 통해 1 kHz 실시간 토크 제어와 컨트롤러 전환 지연 ≤ 2 ms를 달성한다. 고정밀 MuJoCo 시뮬레이션을 연동하고, 실제 로봇의 관성 파라미터 식별을 활용해 동역학 일관성을 개선함으로써 sim‑to‑real 격차를 크게 줄인다.
상세 분석
논문은 최신 협동 로봇이 요구하는 1 kHz 토크 제어 주파수를 유지하면서도 다중 로봇을 하나의 ROS 2 프로세스에서 관리할 수 있는 구조적 혁신을 제시한다. 핵심은 ‘멀티모드 컨트롤러(MC)’와 ‘controllet’이라는 모듈형 설계 패턴이다. MC는 ros2_control의 표준 인터페이스를 그대로 사용하면서, 런타임에 로봇 소유권을 할당하고 controllet 간 충돌을 방지한다. 각 controllet은 하나 이상의 로봇에 대한 토크 계산 로직을 캡슐화하며, C++ 템플릿과 이동 연산자를 적극 활용해 메모리 복사를 최소화한다. 이 설계는 컨트롤러 전환을 서비스 호출 하나로 수행하게 하며, 전환 지연을 2 ms 이하로 제한한다는 점에서 실험 재현성과 복합 작업 시나리오 구현에 큰 장점을 제공한다.
실시간성 확보를 위해 프레임워크는 ros2_control의 실시간 하드웨어 인터페이스와 Franka Control Interface(FCI)를 직접 연결한다. 1 kHz 루프는 ROS 2의 DDS 기반 데이터 전송과 노드 컴포지션을 활용해 최소 지연을 유지한다. 또한, 논문은 기존의 ROS 1 기반 다중 로봇 프레임워크와 비교해, ROS 2가 제공하는 향상된 보안·안정성·실시간 스케줄링을 실제 토크 제어에 적용한 첫 사례 중 하나임을 강조한다.
시뮬레이션 측면에서는 MuJoCo를 ROS 2 패키지 형태로 래핑해, 동일한 컨트롤러 코드를 시뮬레이션과 실제 로봇에 그대로 적용할 수 있게 했다. 이를 통해 kinematic accuracy와 dynamic consistency(토크·힘·제어 오차)를 정량화하는 메트릭을 제시하고, 시뮬레이션과 실제 간 차이를 구체적으로 측정한다. 특히, 실제 로봇에서 관성 파라미터를 식별하고 이를 MuJoCo 모델에 반영함으로써, 힘·토크 추정 오차를 현저히 감소시켰다. 이는 기존 연구가 주로 정책 레벨에서 도메인 적응을 시도한 것과 달리, 물리 엔진 자체를 데이터‑드리븐 방식으로 정교화한 접근이다.
다중 로봇 협동 작업을 검증하기 위해 Unified Force‑Impedance Control(UFIC)과 전통적인 Cartesian impedance control을 구현하고, 15 cm 범위의 y‑축 이동을 포함한 접촉‑풍부 작업에서 성능을 비교한다. 결과는 UFIC가 힘 추적 정확도와 에너지 관리 측면에서 우수함을 보여주며, 제안된 프레임워크가 복합적인 접촉 제어를 안정적으로 수행할 수 있음을 입증한다.
전체적으로 이 논문은 (1) ROS 2 기반 실시간 토크 제어를 다중 로봇에 확장, (2) 컨트롤러 전환 지연 최소화, (3) 고정밀 물리 시뮬레이션과 실제 로봇 간의 피드백 루프 구축, (4) 관성 파라미터 식별을 통한 sim‑to‑real 격차 감소라는 네 가지 핵심 기여를 제공한다. 다만, 현재는 Franka Panda에 한정된 구현이며, 다른 로봇 플랫폼으로의 일반화와 장기적인 안정성 테스트가 향후 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기