AI 기반 객체 상대 자세 추정의 측정식 재구성 및 불확실성 기반 부분 측정 거부 기법
초록
본 논문은 객체 상대 6자유도(6‑DoF) 자세 측정을 EKF에 직접 통합함으로써 회전 오차의 영향을 최소화하고, DNN이 예측한 알레아토릭 불확실성을 동적 측정 공분산으로 활용해 부분적인 위치·회전 측정값을 선택적으로 거부하는 방법을 제안한다.
상세 분석
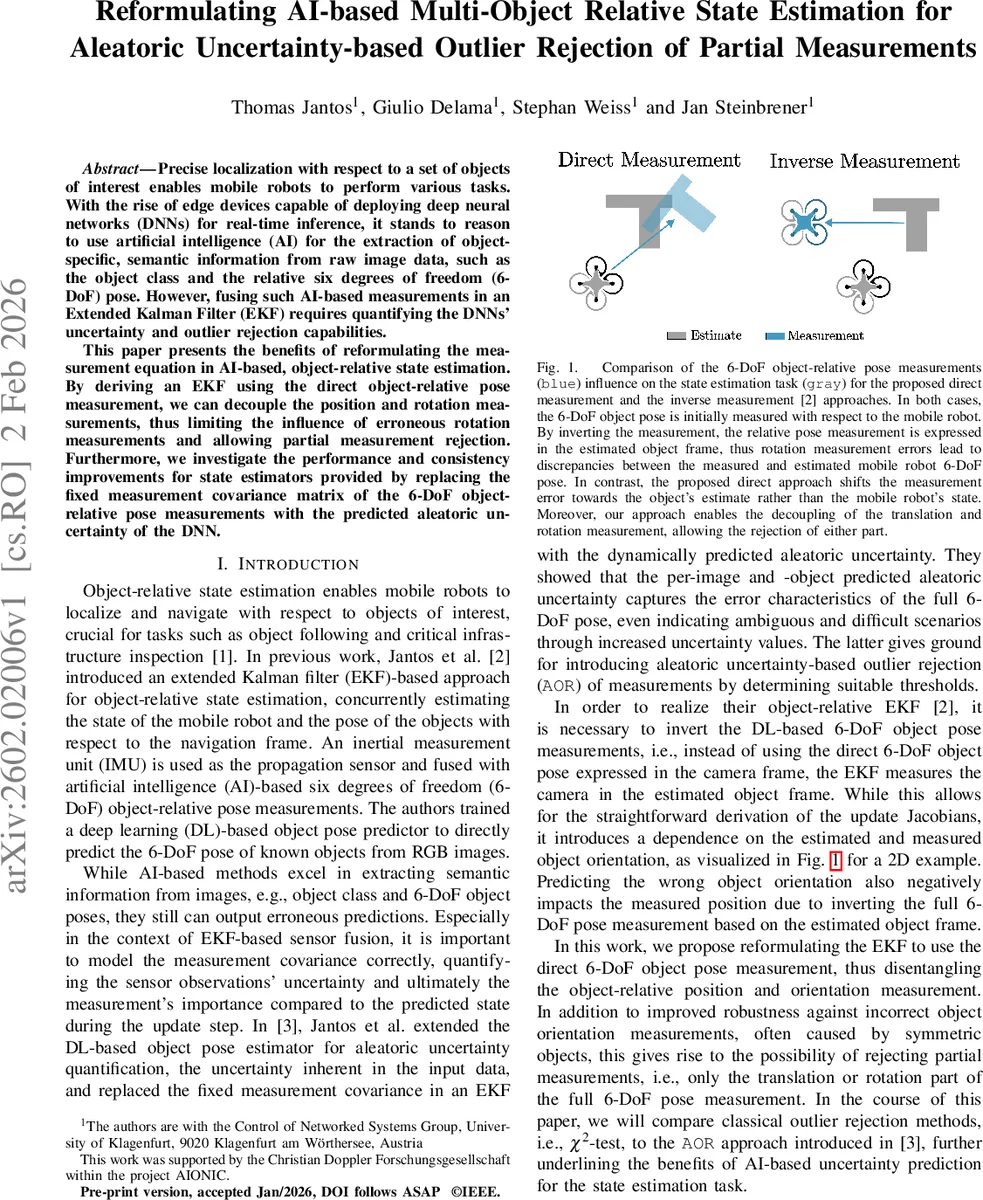
이 연구는 기존의 객체‑상대 EKF가 6‑DoF 측정값을 역변환(inverse)하여 사용함에 따라 회전 추정 오류가 위치 측정에까지 전이되는 구조적 문제점을 지적한다. 저자는 측정식을 “직접” 형태(카메라 프레임에서 객체 프레임으로의 변환)로 재정의함으로써 위치와 회전 잔차를 완전히 분리한다. 이로써 회전 오차가 위치 업데이트에 미치는 부정적 영향을 차단하고, 회전만 불확실하거나 손실된 경우에도 위치 정보만을 활용할 수 있게 된다.
핵심 기법은 두 단계로 이루어진다. 첫째, 딥러닝 기반 6‑DoF 포즈 추정기가 출력하는 알레아토릭 불확실성(데이터 자체의 변동성)을 정규분포 공분산 행렬로 변환해 EKF의 측정 노이즈 공분산 Σ에 동적으로 삽입한다. 이는 고정된 Σ를 사용했을 때 발생하던 과도한 거부 혹은 과다 수용 문제를 완화한다. 둘째, 재구성된 측정식 덕분에 위치와 회전 각각에 대해 별도의 χ² 검정을 수행할 수 있다. 즉, 위치 불확실성만이 임계값을 초과하면 회전은 그대로 유지하고, 반대로 회전 불확실성만이 높을 경우 위치 업데이트만 진행한다. 이러한 “부분 측정 거부”(partial measurement rejection) 메커니즘은 대칭 객체나 부분 가려짐 상황에서 로봇의 상태 추정 안정성을 크게 향상시킨다.
수식적으로는 객체‑상대 변환 T_COi 를 직접 사용하고, 잔차 ˜z_p와 ˜z_R을 각각 (10)–(15)식에 따라 정의한다. Jacobian 행렬 H는 위치와 회전에 대해 별도 파생되며, 회전 행렬의 전치에 대한 미분 규칙(16)을 활용해 정확히 계산된다. 측정 공분산 Σ는 (34)–(36)식으로 구성되며, 알레아토릭 불확실성 ˆσ²_x, ˆσ²_θ 등은 DNN이 이미지당 예측한다. 회전 불확실성은 회전 행렬에 의해 변환된 후 (37)식에 적용돼, 회전 추정이 부정확할 경우에도 위치 공분산에 과도한 영향을 주지 않는다.
실험에서는 χ² 기반 전통적 거부와 알레아토릭 불확실성 기반 거부(AOR)를 비교하고, 부분 거부가 포함된 직접 측정 EKF가 기존 역변환 EKF 대비 RMSE 감소와 NEES(Normalized Estimation Error Squared) 향상을 보임을 입증한다. 특히 대칭 물체와 조명 변화가 큰 환경에서 회전 오류가 크게 발생할 때, 부분 거부 메커니즘이 전체 추정 정확도를 15 % 이상 개선한다는 결과가 강조된다.
이 논문의 기여는 (1) 측정식 재구성을 통해 EKF 구조를 단순화하고 회전‑위치 결합 오류를 해소, (2) DNN 기반 알레아토릭 불확실성을 실시간 공분산으로 활용해 동적 가중치를 제공, (3) 부분 측정 거부 프레임워크를 도입해 로봇이 불완전하거나 불확실한 관측을 효율적으로 무시하도록 함으로써 실시간 모바일 로봇의 견고한 객체‑상대 내비게이션을 가능하게 한다는 점이다.
댓글 및 학술 토론
Loading comments...
의견 남기기