스케일된 선호 조건을 활용한 전천후 지형 비용지도 생성
초록
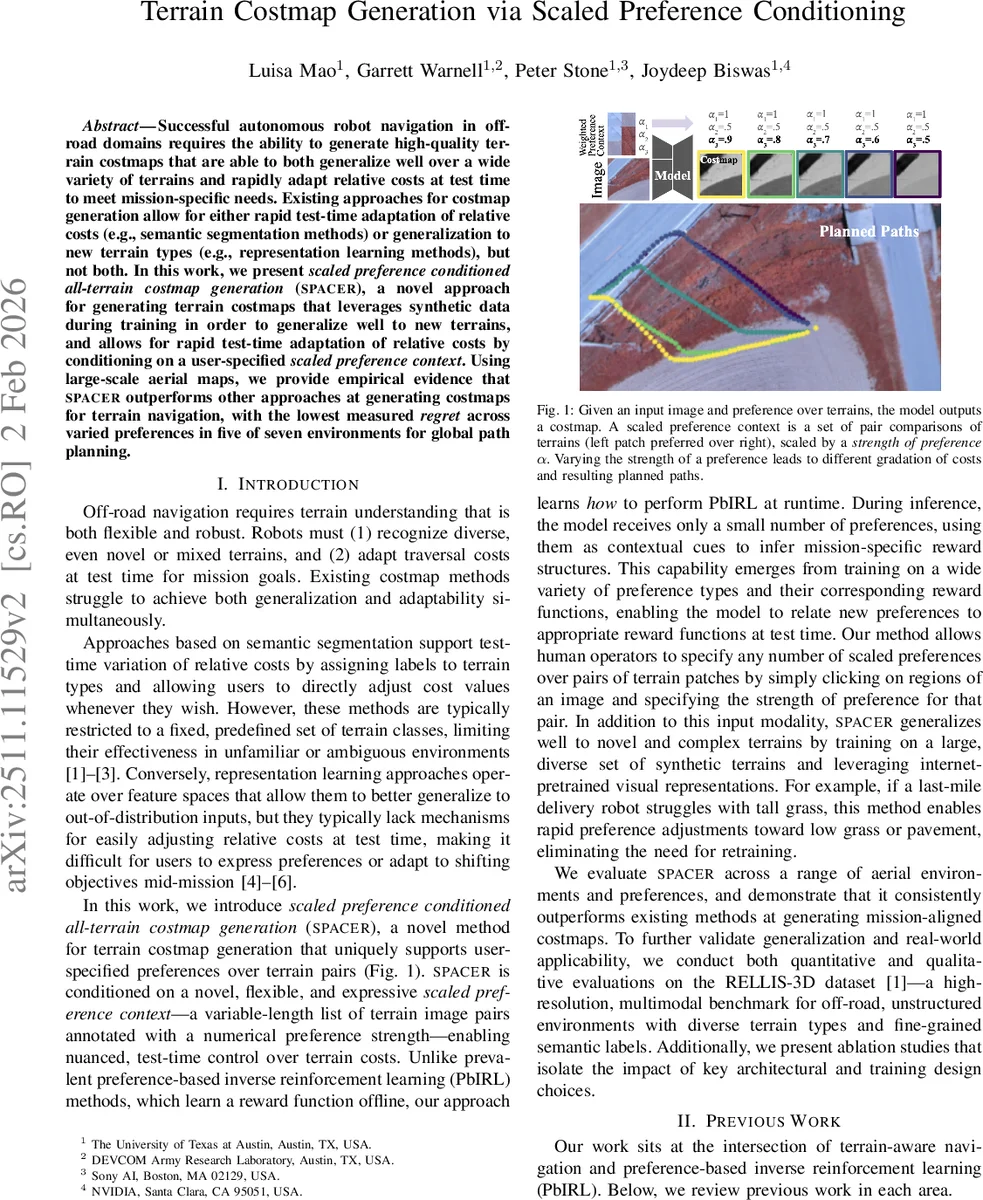
본 논문은 합성 데이터를 활용해 다양한 지형에 대한 일반화 능력을 확보하고, 사용자가 지정한 스케일된 선호 정보를 통해 테스트 시점에 즉시 비용을 조정할 수 있는 새로운 비용지도 생성 모델 SPACER를 제안한다. Bradley‑Terry 모델을 기반으로 한 선호 강도 α를 비용 차이로 매핑하고, 이미지와 선호 컨텍스트를 동시에 인코딩하는 UNet 기반 아키텍처를 설계하였다. 대규모 항공 이미지와 RELLIS‑3D 데이터셋을 이용한 실험에서 기존 방법들을 능가하는 낮은 regret을 기록하였다.
상세 분석
SPACER는 두 가지 핵심 문제—(1) 미지의 지형에 대한 일반화와 (2) 테스트 시점에서의 비용 가중치 조정—를 동시에 해결하려는 시도이다. 기존의 의미론적 세그멘테이션 기반 방법은 사전 정의된 클래스에 의존해 새로운 지형을 인식하지 못하고, 임베딩 기반 학습 방법은 비용 함수를 재학습해야 하는 비효율성을 갖는다. SPACER는 이러한 한계를 극복하기 위해 스케일된 선호 컨텍스트(terrain pair + strength α)를 입력으로 받아, Bradley‑Terry 모델을 역으로 적용해 인간이 의도한 비용 차이를 추정한다. α는 0~1 사이의 실수이며, α + 0.5를 확률로 변환해 sigmoid 함수와 연결함으로써 “강한 선호”일수록 비용 차이가 크게 반영되도록 설계되었다.
아키텍처는 크게 네 부분으로 구성된다. 첫째, 이미지 인코더 F_I는 Stable Diffusion의 VAE 인코더를 고정(frozen) 상태로 사용해 풍부한 시각 특징을 추출한다. 둘째, 선호 컨텍스트 인코더 F_Ξ는 각 지형 패치와 α를 결합해 강한(v_strong) 및 약한(v_weak) 임베딩 사이를 선형 보간한다. 이 보간 방식은 연속적인 스케일링을 가능하게 하며, diffusion 모델에서 시간 임베딩을 차용한 점이 혁신적이다. 셋째, 조건부 UNet U는 이미지 임베딩과 컨텍스트 임베딩을 cross‑attention을 통해 융합하고, 다중 스케일 디코딩을 수행한다. 마지막으로 디코더 D는 UNet 출력의 잠재 벡터를 다시 이미지 공간으로 복원해 비용지도 ˆC를 생성한다.
학습 목표는 두 가지 손실 L₁, L₂의 가중합이다. L₁은 예측된 비용 지도에서 각 지형 클래스의 평균 비용 차이를 Bradley‑Terry 모델이 요구하는 log‑odds와 일치시키는 Huber 손실이며, 이는 선호 강도 α와 직접 연결된다. L₂는 L₂‑norm(또는 Huber) 기반의 정규화 손실로, 예측 비용이 0~1 범위에 머물도록 하고, 비용 스케일이 무한히 커지는 것을 방지한다. λ 하이퍼파라미터로 두 손실의 상대 비중을 조절한다.
데이터 측면에서 저자들은 실제 라벨이 부족한 문제를 해결하기 위해 대규모 합성 데이터 파이프라인을 구축했다. 각 샘플은 (이미지 I, 선호 컨텍스트 Ξ, 세그멘테이션 마스크 S, 목표 비용지도 C_T) 로 구성되며, α는 목표 비용지도에서 두 지형 클래스 평균 비용을 softmax‑derived 확률로 변환해 역산한다. 이렇게 생성된 데이터는 다양한 지형 조합과 선호 강도를 포괄해 모델이 “few‑shot” 선호 추론 능력을 갖추게 한다.
실험에서는 다섯 개의 실제 항공 이미지 환경과 RELLIS‑3D 데이터셋을 사용해 전역 경로 계획 시 regret을 측정하였다. SPACER는 7개 환경 중 5개에서 가장 낮은 regret을 기록했으며, 특히 강한 선호(α≈1)와 약한 선호(α≈0) 사이의 연속적인 비용 변화를 정확히 반영해 로봇이 미리 정의된 비용 함수를 재학습하지 않고도 미션 요구에 맞게 경로를 조정할 수 있음을 보였다. Ablation 연구에서는 (1) 선호 임베딩을 직접 스칼라로 전달했을 때보다 현재의 보간 방식이 성능이 우수함을, (2) VAE 인코더/디코더를 고정했을 때 학습 안정성이 향상됨을, (3) L₂ 정규화가 비용 스케일 드리프트를 방지함을 확인하였다.
전체적으로 SPACER는 “few‑shot preference conditioning”이라는 새로운 패러다임을 제시한다. 인간 운영자가 몇 개의 지형 쌍과 선호 강도만 제공하면, 모델은 즉시 해당 선호를 반영한 비용지도를 생성한다. 이는 오프로드 로봇이 현장 상황에 따라 빠르게 비용을 재조정하고, 동시에 합성 데이터 기반 학습으로 미지의 지형에도 강인하게 대응할 수 있게 만든다.
댓글 및 학술 토론
Loading comments...
의견 남기기