스파크 사족보행 로봇을 위한 프리즘·회전형 척추 모듈
초록
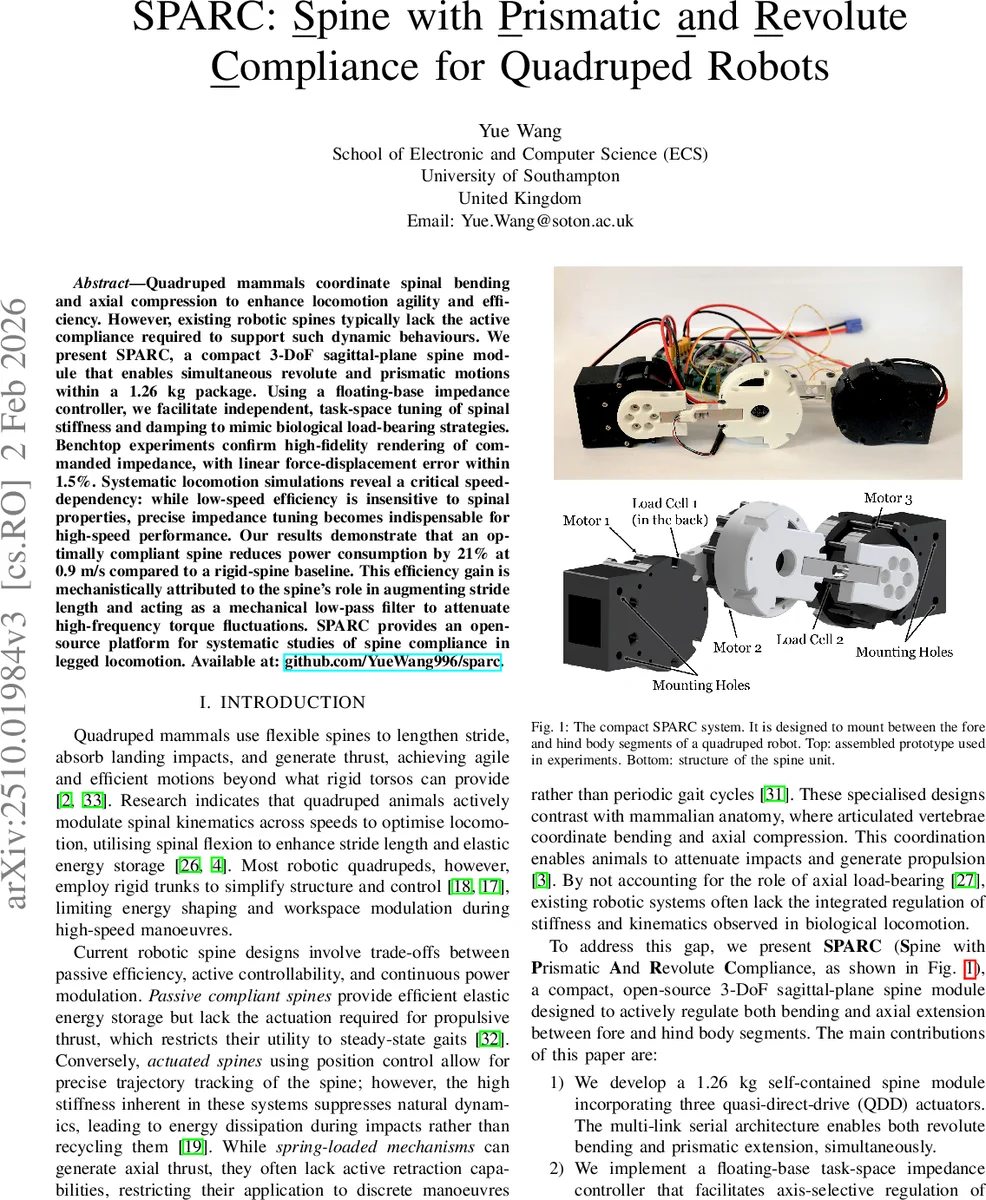
SPARC는 1.26 kg 무게의 3자유도 사족보행 로봇 척추를 구현한다. 회전과 프리즘 운동을 동시에 구동하고, 부동 기반 임피던스 제어로 축별 강성·감쇠를 실시간 조정한다. 실험과 시뮬레이션을 통해 고속 주행 시 21 % 전력 절감 효과를 확인했다.
상세 분석
본 논문은 동물의 척추가 구부러짐과 압축을 동시에 활용해 보폭을 늘리고 충격을 흡수한다는 생체 메커니즘을 로봇에 적용하려는 시도이다. SPARC는 세 개의 quasi‑direct‑drive(QDD) 액추에이터를 직렬 링크에 배치해 회전(피치)과 축방향(prismatic) 두 가지 자유도를 제공한다. 무게 중심을 관절 근처에 집중시켜 관성 효과를 최소화하고, 6축 IMU와 두 개의 로드셀을 탑재해 외부 힘과 자세를 정확히 측정한다. 핵심 제어는 부동 기반(task‑space) 임피던스 제어로, 목표 강성·감쇠 행렬 K와 D를 대각선 형태로 정의해 x, z, θ 축을 독립적으로 조정한다. 제어식은 작업공간 질량 행렬 Λ를 계산한 뒤, 가상 질량‑스프링‑댐퍼 시스템을 구현한다. 여기서 저자들은 베이스 가속에 의한 관성 결합항 M_sb·\dot v_base을 고의로 제외해, 척추가 자연스럽게 충격에 반응하도록 설계하였다. 이는 고속 충격 시 과도한 강성을 방지하고, 실제 동물 척추가 보여주는 저주파 필터 역할을 모방한다. 마찰 보상은 Stribeck 모델을 이용해 정지·쿠볼·점성 마찰을 부드럽게 전이시켜 토크 진동을 최소화한다. 소프트웨어는 FreeRTOS 기반 1 kHz 실시간 루프를 구현하고, ARM CMSIS‑DSP 라이브러리로 행렬 연산을 최적화해 290 µs 이내에 제어를 완료한다. 실험에서는 정적 하중 및 단계 응답을 통해 1.5 % 이내의 힘‑변위 오차를 달성했으며, 시뮬레이션에서는 속도 0.9 m/s에서 강성·감쇠를 최적화했을 때 전력 소비가 21 % 감소함을 보였다. 고속 주행에서는 척추 강성 조절이 보폭을 늘리고 토크 변동을 저주파 필터링함으로써 효율을 크게 향상시키는 반면, 저속에서는 강성 변화가 큰 영향을 미치지 않는다. 이러한 결과는 로봇 척추가 동물과 유사한 에너지 회수·재활용 메커니즘을 제공할 수 있음을 시사한다. 또한 SPARC는 오픈소스 하드웨어·소프트웨어 패키지를 제공해 향후 다양한 사족보행 로봇에서 척추 컴플라이언스를 체계적으로 연구할 수 있는 기반을 마련한다.
댓글 및 학술 토론
Loading comments...
의견 남기기