동적 확장 최소화 탐색: 범주 이론과 동적 프로그래밍을 통한 새로운 시각
초록
본 논문은 비선형 제어 시스템을 피드백 선형화하기 위한 최소 동적 프리컴펜세이터를 찾는 문제를 범주 이론과 동적 프로그래밍 관점에서 재구성한다. 동적 확장을 카테고리의 화살표로 모델링하고, 유한한 서브카테고리에서는 전통적인 탐색 알고리즘으로 최적(최소) 확장을 찾을 수 있음을 보인다. 무한한 경우에는 피드백 선형화 가능성을 높이는 휴리스틱을 제시한다.
상세 분석
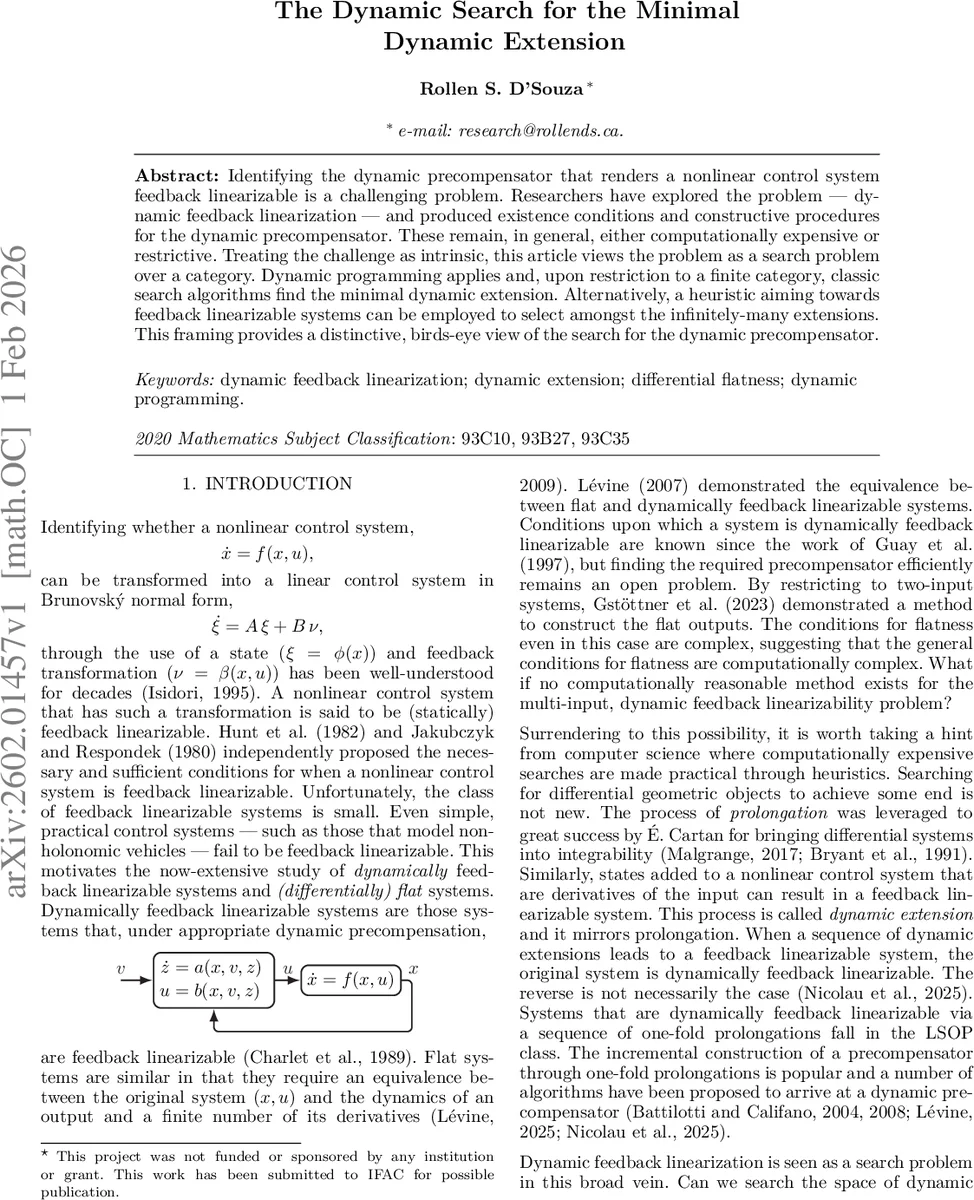
이 논문은 동적 피드백 선형화(dynamic feedback linearization) 문제를 “동적 프리컴펜세이터(dynamic precompensator)”를 찾는 작업으로 정의하고, 이를 기존의 미분 기하학적 접근법과는 다른 추상적 구조—범주(category)—위에 놓는다. 저자는 비선형 시스템 (\dot x = f(x,u)) 를 외부 미분 시스템 (I^{(0)}) 로 표현하고, 파생 플래그(derived flag) (I^{(k)}) 를 이용해 시스템이 피드백 선형화 가능한지 여부를 판단한다. 기존 이론에서는 파생 플래그가 만족해야 할 ‘involutivity(Inv)’와 ‘controllability(Con)’ 조건을 검증하는 것이 핵심이었으나, 이 과정은 계산적으로 매우 복잡하고 다중 입력 시스템에서는 실용성이 떨어진다.
논문은 이러한 복잡성을 해소하기 위해 “정규 영다이내믹 foliation(regular zero dynamics foliation)”이라는 새로운 기하학적 객체를 도입한다. 이는 특정 출력 (h) 가 벡터 상대 차수(vector relative degree)를 가질 때 그 레벨 집합이 형성하는 잎(leaf)들의 모임이며, 이 잎들은 시스템의 영다이내믹을 기술한다. 정규 영다이내믹 foliation은 미분 아이디얼 (I(Z)) 와 프뢰베니우스 정리를 통해 생성·분석될 수 있다. 저자는 이 foliation을 기반으로 동적 확장(dynamic extension)을 정의한다. 구체적으로, 출력 (h) 의 파생을 새로운 가상 입력 (v_j = L_f^{\kappa_j} h_j) 로 치환하고, 이 가상 입력을 적분기(통합기)와 연결함으로써 시스템 차원을 늘리는 과정을 ‘확장 시스템(extension system)’이라 명명한다. 확장 시스템은 두 개의 정규 비선형 제어 시스템 ((M_1,I^{(0)}_1)) 와 ((M_2,I^{(0)}_2)) 사이에 매끄러운 서브머전 (\pi) 가 존재하고, (\pi^* I^{(0)}_1 \subset I^{(0)}_2) 와 정규 영다이내믹 foliation의 보존이라는 두 조건을 만족한다.
핵심 정리(Theorem 5)는 차원 차이가 2 이상인 확장 시스템에 대해, 중간 시스템 ((M_\bullet, I^{(0)}_\bullet)) 를 삽입해 연속적인 일단계(dynamic one‑step) 확장들의 사슬을 구성할 수 있음을 보인다. 이는 기존의 ‘one‑fold prolongation’ 방식과 일치하지만, 보다 일반적인 서브머전 구조를 허용한다는 점에서 확장의 자유도가 넓어진다. 결과적으로 모든 피드백 선형화 가능한 시스템은 LSOP(Linearizable via Single‑step One‑fold Prolongations) 클래스에 속한다는 결론을 얻는다.
다음 단계로 저자는 동적 프로그래밍을 범주 이론에 적용한다. 벨먼의 최적 원리(principle of optimality)를 “카테고리 내에서 최적 화살표(optimal arrow)를 선택한다”는 형태로 재해석한다. 유한 카테고리에서는 다익스트라, A* 등 전통적인 최단 경로 알고리즘을 그대로 사용할 수 있다. 이때 비용 함수는 추가된 상태 변수(동적 확장의 차원)와 계산 복잡도 등을 반영하도록 설계한다. 무한 카테고리에서는 휴리스틱을 도입해 피드백 선형화 가능성이 높은 확장 경로를 우선 탐색한다. 저자는 이러한 휴리스틱이 ‘벡터 상대 차수 0인 출력’을 우선적으로 선택하고, 정규 영다이내믹 foliation과의 정합성을 검증하는 절차를 포함한다고 제시한다.
전체적으로 논문은 다음과 같은 중요한 통찰을 제공한다. 첫째, 동적 확장을 카테고리의 화살표로 모델링함으로써 탐색 공간을 명시적으로 구조화한다. 둘째, 정규 영다이내믹 foliation을 통해 동적 확장의 기하학적 타당성을 보장한다. 셋째, 동적 프로그래밍을 이용해 최소 차원의 확장을 효율적으로 찾을 수 있는 알고리즘적 프레임워크를 제시한다. 마지막으로, 무한 탐색 공간에 대한 휴리스틱 설계 원칙을 제시함으로써 실제 공학 문제에 적용 가능한 실용적 접근법을 제공한다. 이러한 접근은 기존의 미분 기하학 기반 방법이 갖는 계산적 한계를 극복하고, 복잡한 다중 입력 비선형 시스템에도 확장 가능성을 열어준다.
댓글 및 학술 토론
Loading comments...
의견 남기기