비상 출혈 억제를 위한 형태 변환형 착용형 로봇 조끼
초록
본 논문은 원형에서 타원형으로 변형 가능한 링 메커니즘과 유연한 팔, 그리고 인플레이터블 링·에어백을 결합한 착용형 로봇을 제안한다. 링 팔의 굽힘 강성을 실험적으로 평가하고, 에어백의 압력·힘을 디지털 스케일로 측정하였다. 시뮬레이션 인체 모델에서 출혈 억제 효과를 검증했으며, 커버리지 제한과 복잡한 해부학적 형상 적응 한계가 존재함을 보고한다.
상세 분석
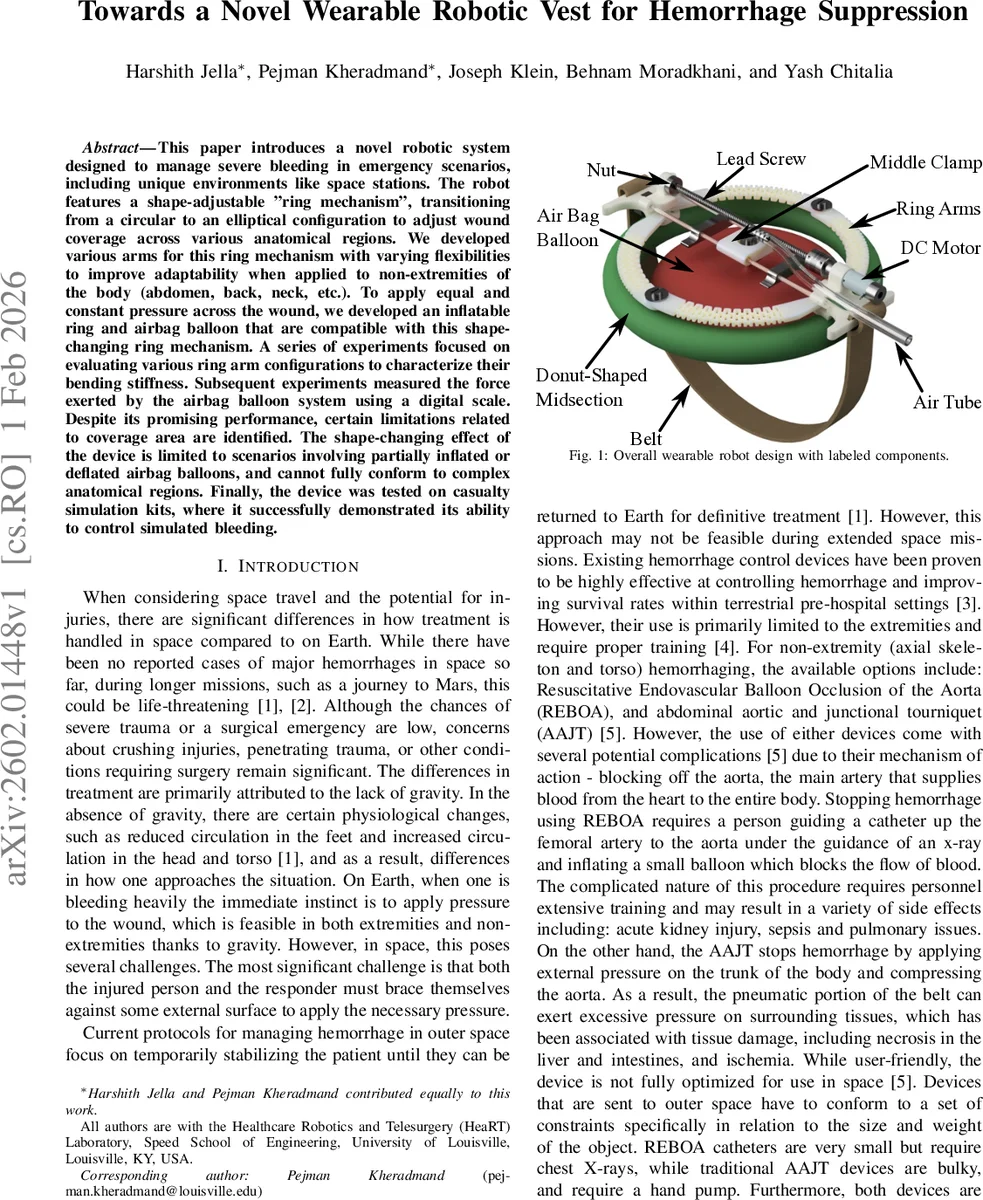
이 연구는 중증 출혈을 신속히 제어해야 하는 우주·원격 환경을 목표로, 기존의 극단적 부위 전용 토너킷(AAJT, REBOA)과는 달리 비극단 부위(복부·목·등 등)에도 적용 가능한 착용형 로봇을 설계하였다. 핵심은 ‘링 메커니즘’으로, DC 모터와 리드스크류 구동을 통해 링 팔을 원형에서 타원형으로 변형시켜 상처 형태에 맞춘 압력 분포를 구현한다. 링 팔은 세 가지 설계(표준, 컷아웃, 리지)로 제작되었으며, Castigliano 이론을 기반으로 굽힘 강도를 모델링하고, Vero 카메라와 ANSYS 시뮬레이션을 통해 실험적·수치적 검증을 수행하였다. 결과적으로 리지형 팔이 가장 낮은 강성(EI≈2.7×10⁻⁷ N·m²)과 균일한 응력 분포를 보여, 유연성과 내구성 사이의 최적 균형을 제공한다는 점이 강조된다. 인플레이터블 링은 TPE와 PTFE 복합층으로 4.83 kPa에서 부피가 5배 이상 팽창하며, 일회용 에어백은 동일 압력에서 1.83 × 10⁶ mm³까지 확장된다. 압력 시험에서는 디지털 스케일을 이용해 에어백이 4.83 kPa에서 약 12 N의 정압을 가함을 확인했으며, 이는 인체 조직에 안전하면서도 출혈을 억제하기에 충분한 수준이다. 최종 시뮬레이션 인체 모델(인체 모형 키트)에서는 로봇이 지속적인 압력을 제공해 모의 출혈을 효과적으로 차단하였다. 그러나 장치가 부분적으로 팽창된 상태에서만 형태 변환이 가능하고, 복잡한 곡면(예: 갈비뼈 주변)에는 완전한 적합이 어려운 점, 그리고 에어백·링의 일회용성으로 인한 폐기물 문제가 남아 있다. 향후 연구에서는 링 팔의 형상 최적화, 다중 압력 센서 통합, 재사용 가능한 인플레이터블 소재 개발, 그리고 실제 인간 피험자를 대상으로 한 임상 시험이 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기