강인한 자율수면선박 궤적 추적을 위한 리 대수 온라인 MPC
초록
본 논문은 바람·파도 등 환경 교란이 존재하는 해양 환경에서 ASV(자율수면선박)의 궤적 추적 정확도를 높이기 위해, Lie 그룹 기반 오류 상태 MPC와 Fourier 특성 기반 온라인 학습 모듈을 결합한 경량 제어기를 제안한다. 실시간으로 교란을 보상하면서도 단일 CPU 코어에서 실행 가능한 계산 효율성을 확보하였다. VRX 시뮬레이터와 실제 강에서의 실험을 통해 기존 PID, L1‑Adaptive MPC, 순수 Lie‑MPC 대비 RMSE가 현저히 낮은 것을 확인하였다.
상세 분석
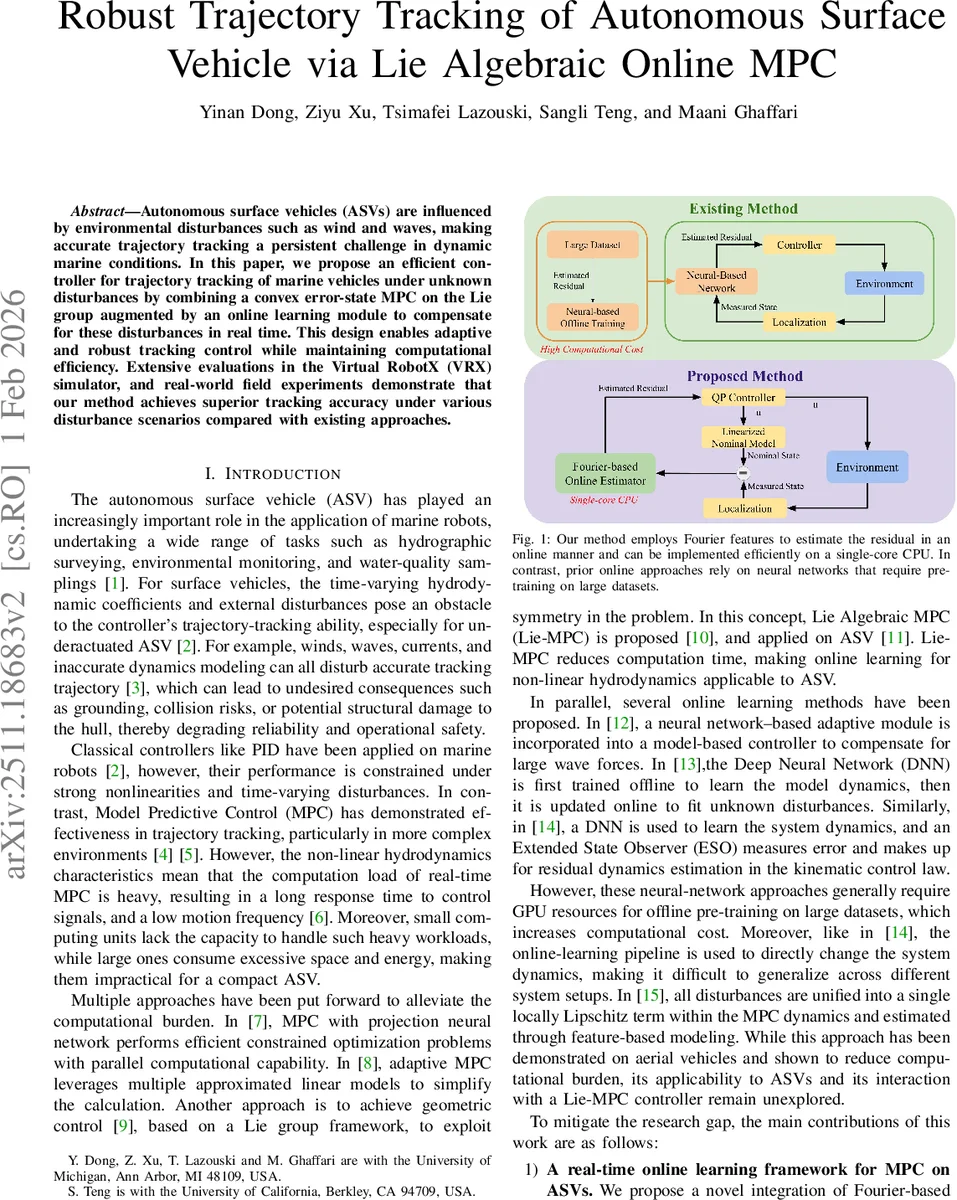
이 연구는 세 가지 핵심 기술을 융합한다. 첫째, 선박의 6자유도 동역학을 SE(3) Lie 그룹 위에 정의하고, 좌측 불변 오차 ψ를 Lie 대수 se(3)로 선형화함으로써 오류 상태를 직접 다루는 Convex Error‑State MPC를 설계한다. 이때 시스템 행렬 Aₜ, Bₜ, hₜ는 Fossen 모델을 기반으로 1차 테일러 전개하여 얻으며, 외부 교란 δₜ는 잔차 항으로 명시된다. 둘째, 잔차 δₜ를 실시간으로 추정하기 위해 Fourier Feature Map Φ(Zₜ)를 사용한다. Zₜ는 현재 상태 xₜ와 시간 t를 결합한 13‑차원 벡터이며, Φ는 사인·코사인 쌍으로 구성된 고차원 특성을 제공한다. 온라인 학습은 슬라이딩 버퍼에 저장된 최근 N개의 샘플을 이용해 손실 ℓₜ = Σ‖δⱼ−ĈᵀΦ(Zⱼ)‖² + λ‖ĈᵀΦ(Zⱼ)−ĈᵀΦ(Zⱼ₋₁)‖² 를 최소화하는 경사 하강법으로 가중치 행렬 Ĉ를 업데이트한다. 이 과정은 사전 학습이 필요 없으며, 단일 CPU 코어에서도 실시간으로 수행될 수 있다. 셋째, 특징 선택을 위해 이중 최적화(Bi‑level Feature Extraction)를 도입한다. 내부 루프에서는 L1 정규화된 손실을 최소화해 진폭 파라미터 C를 최적화하고, 외부 루프에서는 주파수 파라미터 fⱼ를 조정해 전체 예측 오차를 감소시킨다. 이렇게 선택된 30개의 주요 Fourier 특성은 계산량을 크게 줄이면서도 교란의 주된 주파수 성분을 포착한다.
제안된 컨트롤러는 OSQP 기반 QP 솔버를 이용해 매 제어 주기마다 최적 입력 τₖ를 계산하고, 예측된 잔차 {δ̂ₖ₊₁…δ̂ₖ₊N}을 MPC 제약식에 주입한다. 따라서 MPC는 향후 전체 플래닝 호라이즌 동안 교란을 사전 보상할 수 있다. 실험에서는 VRX 시뮬레이터에서 10회 반복 테스트와 실제 강에서의 풍동 실험을 수행했으며, 초기 위치 오프셋을 무작위로 주입해 로버스트성을 검증하였다. 성능 평가는 궤적 RMSE(두 번째 절반 구간)로 측정했으며, 제안 방법은 Nominal Lie‑MPC, L1‑Adaptive MPC, 전통 PID 대비 평균 RMSE를 30 % 이상 감소시켰다. 또한, 계산 시간은 5 ms 이하로 유지돼 저전력 임베디드 보드에서도 실시간 적용이 가능함을 입증하였다.
이 논문의 주요 기여는 (1) Lie‑Algebra 기반 오류 상태 MPC와 Fourier 온라인 학습을 결합한 경량 실시간 교란 보상 프레임워크, (2) 이중 최적화를 통한 핵심 주파수 특성 자동 추출, (3) 시뮬레이션·실험 양쪽에서 검증된 높은 추적 정확도와 계산 효율성이다. 향후 연구에서는 다중 선박 협동, 비선형 파동 모델링, 그리고 적응형 비용 행렬 설계 등을 통해 시스템의 범용성을 확대할 수 있을 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기