샘플 효율적인 B 스플라인 기반 확산 로컬 플래너 SanD‑Planner
초록
SanD‑Planner는 깊이 이미지와 목표 좌표를 입력으로 받아, 고정된 개수의 B‑스플라인 제어점을 예측하는 확산 모델을 사용한다. B‑스플라인의 C² 연속성과 지역 지원(local support) 특성을 활용해 부드럽고 충돌 회피가 가능한 경로를 생성하며, ESDF 기반 안전 검증기를 통해 실시간으로 후보 경로를 평가한다. 500개의 전문가 시연만으로도 기존 대규모 데이터 기반 방법을 크게 앞서며, 시뮬레이션·실제 환경 모두에서 높은 성공률을 보인다.
상세 분석
본 논문은 로컬 네비게이션 문제를 “데이터 사막” 상황에서도 해결할 수 있는 방법론을 제시한다는 점에서 의미가 크다. 기존의 엔드‑투‑엔드 혹은 DRL 기반 접근법은 수백만 단계의 시뮬레이션 데이터와 복잡한 보상 설계가 필요하지만, SanD‑Planner는 500개의 시연(전체 데이터의 0.25 %)만으로도 경쟁력 있는 성능을 달성한다. 핵심 아이디어는 클램프된 3차 B‑스플라인 제어점 공간에 정책을 매핑하는 것이다.
-
표현 효율성: B‑스플라인은 N개의 제어점만으로 전체 곡선을 정의한다. 논문에서는 8개의 제어점을 사용해 1 m~2 m 정도의 로컬 구간을 표현한다. 이는 waypoint 기반 방법이 필요로 하는 8 × 3 = 24개의 좌표를 직접 예측하는 것보다 차원 수가 현저히 낮아, 확산 모델의 샘플링·학습 효율을 크게 향상시킨다.
-
스무스함을 구조적 편향으로: 3차 B‑스플라인은 C² 연속성을 보장한다. 따라서 속도·가속도 프로파일이 자연스럽게 매끄럽게 나오며, 별도의 스무스 페널티를 학습에 포함시킬 필요가 없다. 이는 제한된 데이터에서도 과적합 없이 일반화 가능한 궤적을 생성하게 만든다.
-
지역 지원과 볼록 껍질 특성: B‑스플라인의 한 구간은 p+1(=4)개의 인접 제어점에만 의존한다. 먼 거리에서 발생한 센서 노이즈는 해당 구간 제어점에만 영향을 미치고, 현재 실행 구간에는 전파되지 않는다. 또한 모든 베이시스 함수가 양수이며 합이 1이므로, 궤적은 제어점들의 볼록 껍질 안에 머문다. 이는 예측 오차가 경로 전체에 과도하게 증폭되는 것을 방지한다(수식 (2) 참조).
-
조건부 확산 정책: 입력으로 4장의 연속 깊이 이미지, 목표 좌표, 이전 속도(v_prev)를 사용해 토큰화하고, 2‑layer Transformer 인코더로 컨텍스트 C_t를 만든다. 이후 DDPM(v‑prediction) 형태의 확산 모델이 C_t에 조건화되어 제어점 벡터 x₀을 샘플링한다. 100~200 step의 역확산 과정을 거쳐 K(=10)개의 후보를 생성하고, 각 후보를 B‑스플라인으로 변환한다.
-
ESDF 기반 기하학적 크리틱: 후보 궤적마다 최소 거리(min clearance)와 예상 완료 시간(time‑to‑completion)을 계산한다. 비용 J = w₁·(1/clearance) + w₂·time 등으로 정의된 다중 목표 함수를 최소화하는 궤적을 선택한다. 이 방식은 별도의 가치 함수 학습을 없애고, 안전성 검증을 명시적으로 분리함으로써 정책 학습을 단순화한다.
-
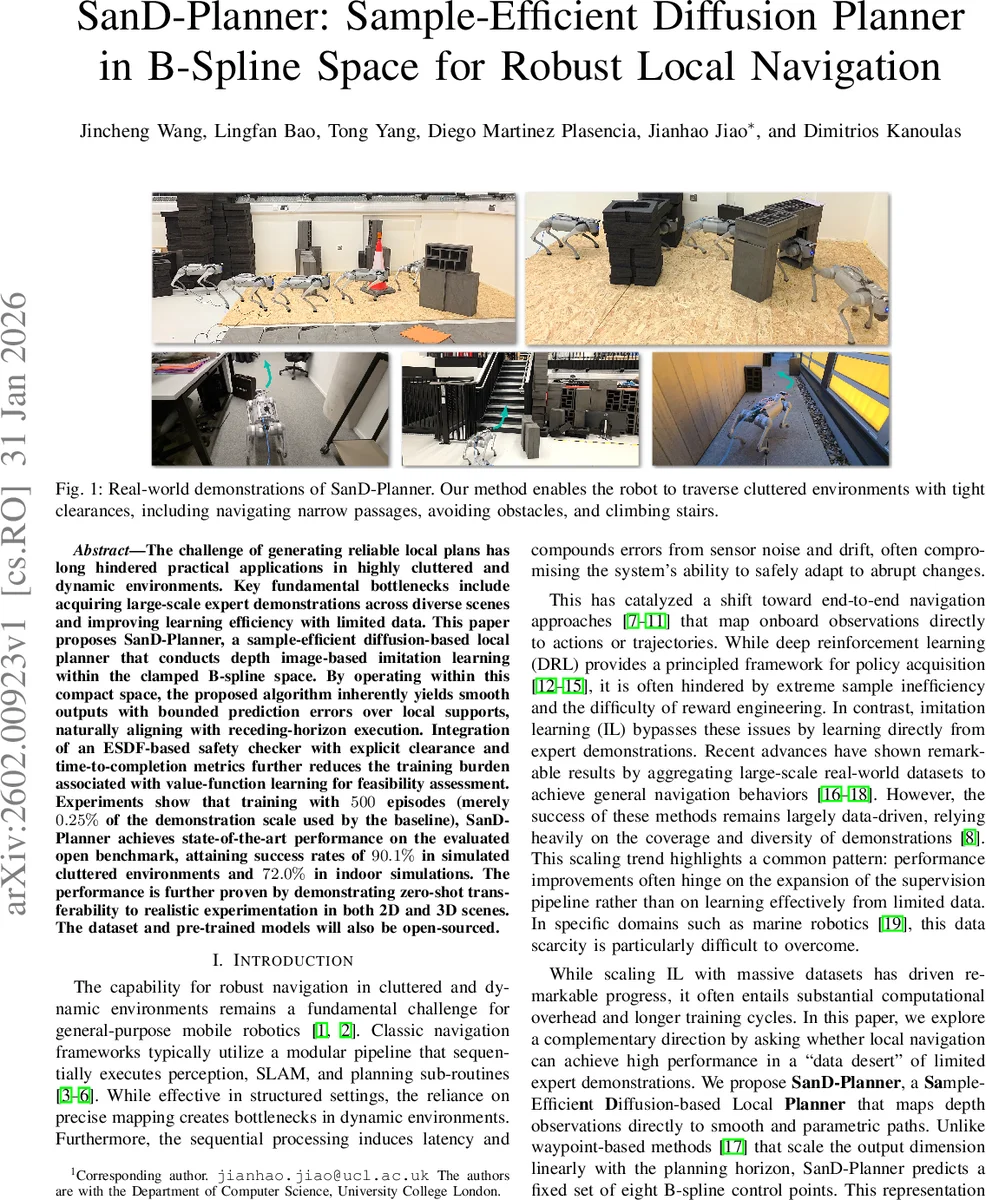
실험 결과: 500개의 시연으로 학습한 모델은 공개 벤치마크에서 시뮬레이션 클러터 환경 90.1 % 성공률, 실내 시뮬레이션 72.0 % 성공률을 기록했다. 이는 기존 NavDP 등 대규모 데이터 기반 방법보다 동일하거나 높은 수준이다. 또한 Unitree Go2 로봇에 zero‑shot으로 적용해 2D·3D 실제 환경(좁은 복도, 계단, 동적 장애물)에서 성공적인 주행을 보였다.
-
재현성 및 공개: 데이터셋, 사전 학습 모델, 학습·평가 파이프라인을 모두 오픈소스로 제공한다는 점은 연구 커뮤니티가 바로 실험을 재현하고 확장할 수 있게 만든다.
한계와 향후 과제: 현재는 깊이 이미지와 목표점만을 사용했으며, RGB·포즈 정보가 포함되면 더 복잡한 동적 상황에 대응할 수 있을 것이다. 또한 B‑스플라인 차수를 늘리거나 비균일 knot 배치를 적용하면 비선형 구간에서도 더 정밀한 제어가 가능할 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기