SRL 근접공간 설계 가이드라인
초록
이 논문은 착용형 초과 로봇 팔(SRL)의 근접신체 상호작용에서 사용자가 느끼는 안전감, 신뢰 및 제어감을 향상시키기 위한 ‘SRL Proxemics’라는 공간‑구조적 프레임워크를 제시한다. 18명을 대상으로 한 Wizard‑of‑Oz 실험에서 참가자들은 신체 부위별로 허용 가능한 움직임 영역과 자율성 수준을 규정했으며, 높은 자율성이 반드시 안전감을 높이지 않음을 확인했다. 연구 결과는 신체를 민감도에 따라 구역화하고, 각 구역·팔 부위별로 차등된 자율성·신호 전략을 적용해야 함을 강조한다.
상세 분석
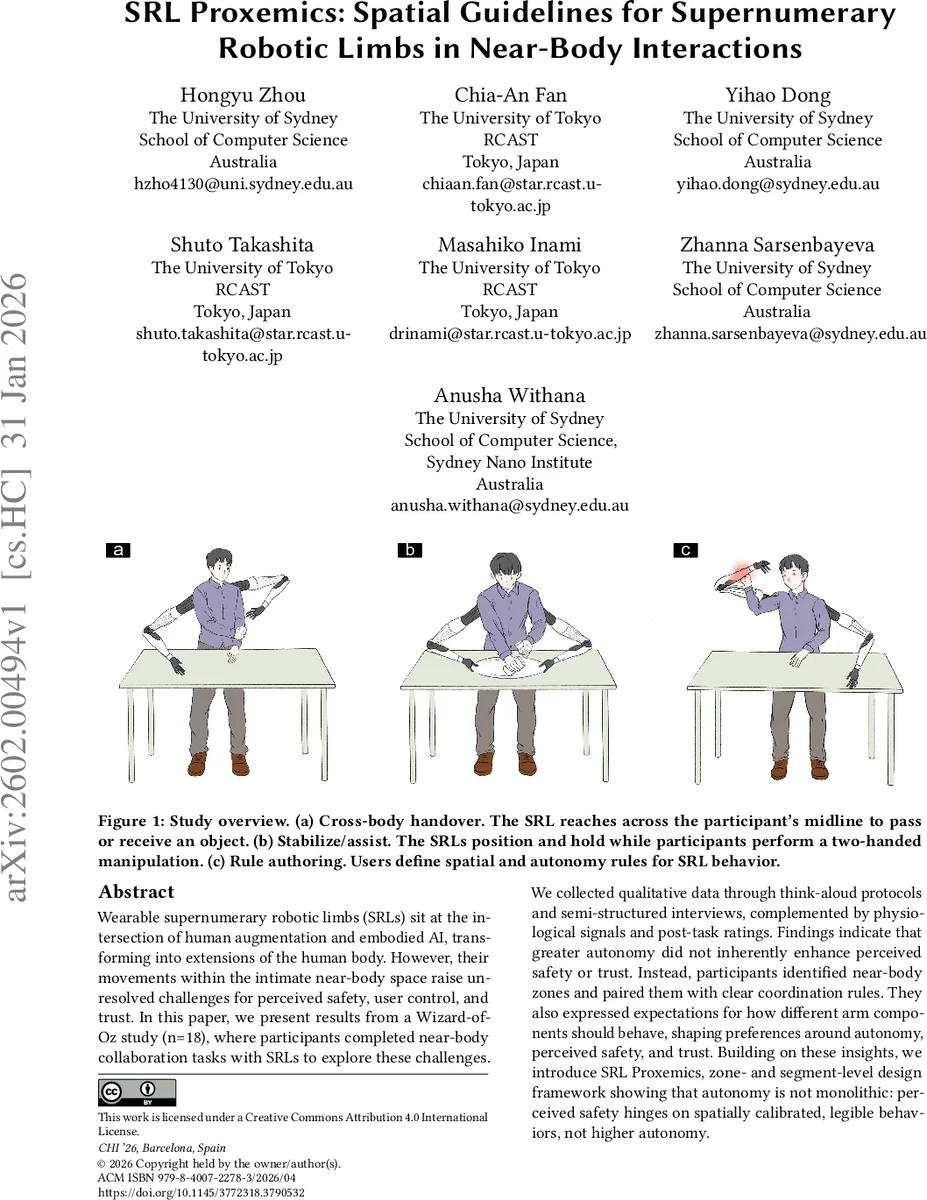
본 연구는 착용형 초과 로봇 팔(SRL)이 인간의 근접신체 공간(peripersonal space)에서 어떻게 행동해야 하는지를 규명하기 위해, 두 가지 근접협업 과업(가로 횡손 전달, 물체 고정·보조)과 규칙 저작 단계(rule authoring)를 포함한 복합 실험을 설계하였다. 18명의 참가자는 Wizard‑of‑Oz 방식으로 제어되는 프로토타입을 직접 체험하면서, 실시간으로 ‘자율성 수준(높음/낮음)’과 ‘공간 구역(머리·상체·팔·손목·팔꿈치·허리 등)’에 대한 선호를 구두로 서술하고, 생각소리(think‑aloud)와 반구조화 인터뷰를 통해 정성적 데이터를 제공하였다. 동시에 피부전도도(SCR)와 사후 설문(안전감, 신뢰, 임베디드감)으로 정량적 지표를 수집함으로써, 주관적 경험과 생리적 반응을 교차 검증하였다.
핵심 발견은 다음과 같다. 첫째, 참가자들은 신체를 ‘고감도 구역(머리·얼굴·가슴·복부)’과 ‘저감도 구역(팔·손목·다리 등)’으로 자연스럽게 구분하고, 고감도 구역에서는 SRL의 움직임을 엄격히 제한하고 사용자 확인을 요구하는 반면, 저감도 구역에서는 보다 높은 자율성을 허용하였다. 둘째, 자율성 수준이 높다고 해서 안전감이나 신뢰가 자동으로 상승하지 않는다. 오히려, 고감도 구역에서의 불투명한 자동 움직임은 불안과 높은 SCR을 유발했다. 셋째, 팔의 각 구성요소(베이스, 관절, 손목, 그리퍼)마다 기대되는 행동 양식이 다르다. 예를 들어, 베이스는 부드러운 접근과 저속 이동을, 손목·그리퍼는 명확한 시각·청각 신호와 함께 ‘접촉 전 경고’를 제공해야 한다는 의견이 다수였다.
이러한 결과를 토대로 저자들은 ‘SRL Proxemics’라는 프레임워크를 제안한다. 프레임워크는 (1) 신체 구역별 자율성 그라디언트, (2) 부위별 동작 제한(속도·가속도·경로), (3) 상황·구역에 맞는 다중 감각 신호(모터 소음, 진동, LED, 음성) 세 축을 결합한다. 특히, 자율성은 전역적인 이진값이 아니라, 구역·작업 컨텍스트에 따라 동적으로 조정되는 ‘스페이셜 자율성’으로 재정의된다. 이는 기존 연구가 제시한 ‘전역 자율성’ 혹은 ‘완전 수동 제어’와는 근본적으로 다른 접근이다.
또한, 연구는 설계 시 고려해야 할 실용적 시사점을 제시한다. 첫째, SRL은 사용자가 직접 정의한 ‘안전 구역 지도’를 내장하고, 실시간으로 사용자 자세와 위치를 추적해 구역 전환을 감지해야 한다. 둘째, 고감도 구역 진입 시에는 ‘확인 요청(예: 버튼, 음성)’과 ‘예측 가능한 경로 시각화’를 제공해 인지적 부하를 최소화한다. 셋째, 물리적 접촉 전후에 ‘예고·피드백’(진동·음성)으로 행동을 명시적으로 표시함으로써 신뢰 형성을 촉진한다. 마지막으로, 사용자 맞춤형 규칙 저작 인터페이스를 제공해, 개인별 감도 차이와 문화적 차이를 반영한 맞춤형 프로시저를 구축할 수 있다.
전반적으로 이 논문은 착용형 초과 로봇 팔이 인간의 몸에 ‘연장’으로 받아들여지기 위해서는 물리적 안전을 넘어 ‘인지적 안전(assuredness)’을 설계에 내재시켜야 함을 강조한다. 공간‑구조적 자율성 조절과 명료한 신호 체계가 결합될 때, 사용자는 SRL을 신뢰하고 자연스럽게 몸의 일부로 통합할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기